Geometries with no orientation support
74 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
See also
Link Lengths on page 72
End Effector Offsets on page 74
Configuration parameters for Articulated Independent robots on page 71
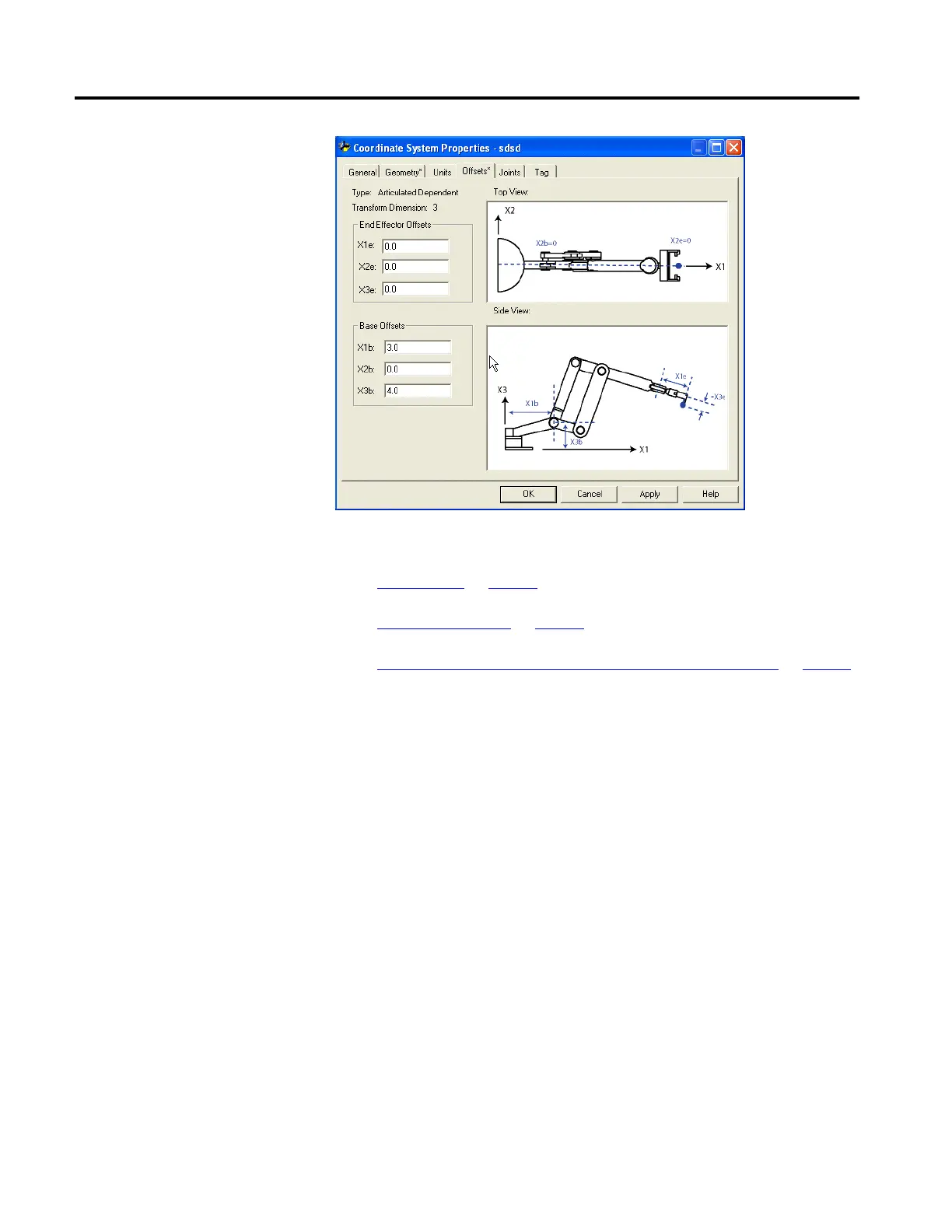
The robot can have an end effector attached to the end of robot link L2. If there is
an attached end effector, configure the End-Effector Offset value on the Offsets
tab in the Coordinate System Properties dialog box. The End-Effector Offsets
are defined with respect to the tool reference frame at the tool tip.
End-Effector Offsets for
Articulated Independent robot
 Loading...
Loading...

