Geometries with orientation support
166 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
The configuration parameter information is available from the robot
manufacturer.
Important: Verify that the values for the Link Lengths, Base Offsets, and End-Effector Offsets are entered in the
Coordinate System Properties dialog box using the same measurement units.
See also
Link Lengths for Delta J1J2J3J6 robot on page 166
Base and Effector Plate dimensions for Delta J1J2J3J6 robot on page 167
Swing Arm offsets for Delta J1J2J3J6 robot on page 168
Configure Zero Angle Orientation for Delta J1J2J3J6 robot on page 170
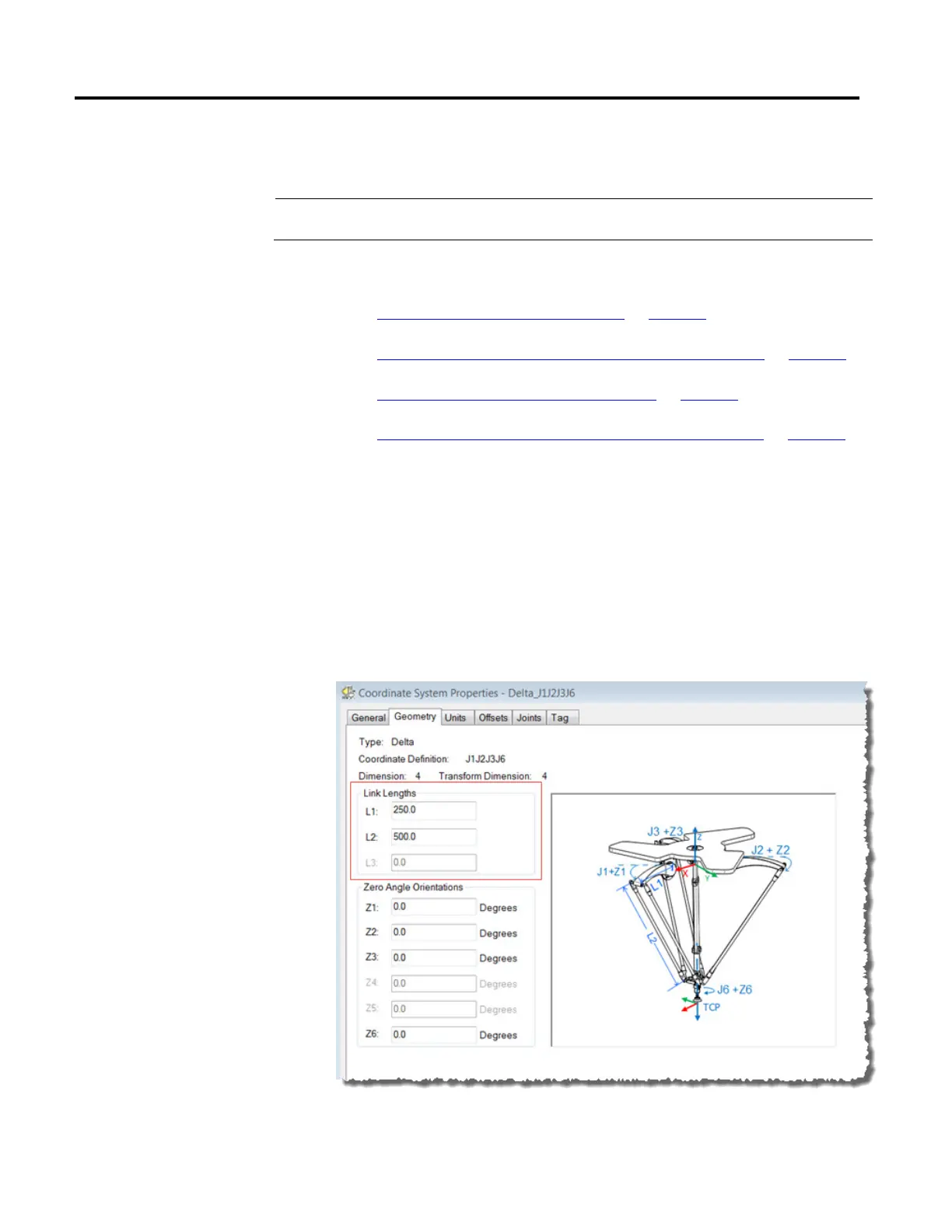
Link lengths are the rigid mechanical bodies attached at the rotational joints. The
four-dimensional Delta robot geometry has three link pairs made up of L1 and
L2. Each link pair has the same dimensions.
• L1 - link attached to each actuated joint (J1, J2, and J3)
• L2 - link attached to L1 on one end and the end plate at the other end
Enter the link lengths on the Geometry tab in the Coordinate System
Properties dialog box.
Link Lengths for Delta J1J2J3J6
robot
 Loading...
Loading...

