Geometries with orientation support
158 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
Base and Effector Plate dimension for Delta J1J2J6 robot on page 152
Use these guidelines to determine the maximum joint limit conditions for the
four-dimensional robot.
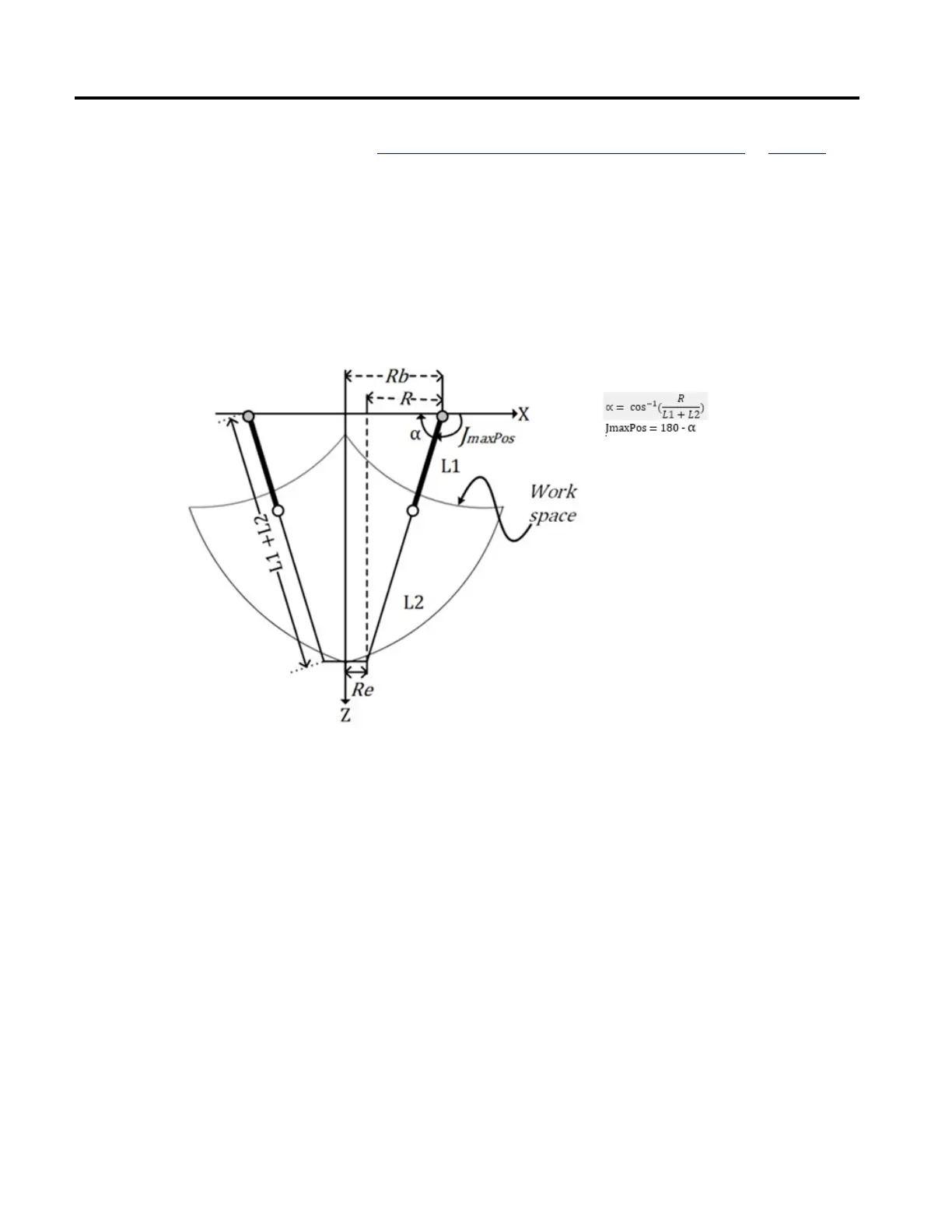
Maximum J1, J2 Positive joint limit condition
The derivations for the maximum positive joint apply to the condition when L1
and L2 are collinear.
Maximum Positive Joint Limit Position
R = absolute value of (Rb - Re)
Maximum J1, J2 Negative joint limit condition
The derivations for the maximum negative joint limit apply to the condition when
L1 and L2 are folded back on top of each other.
R is computed by using the base and end-effector offsets values (Rb and Re).
Maximum joint limit condition
for Delta J1J2J6 robot
 Loading...
Loading...

