Geometries with no orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 83
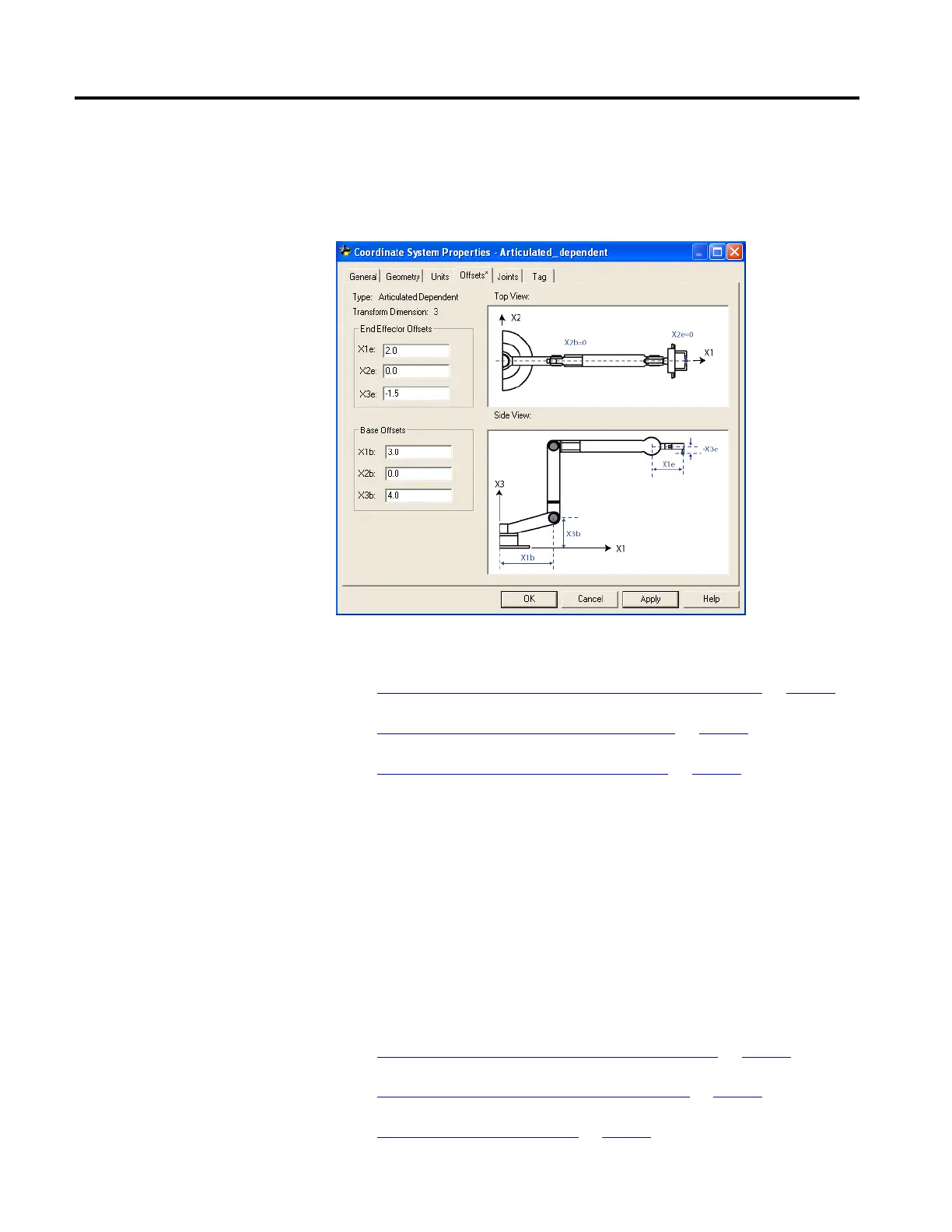
Some robots also have an offset defined for the J3 joint. Account for this value
when computing the X3e end effector offset value. If the value for X3e offset is
entered as the sum of X3e1+X3e2 (-3+1.5 = -1.5), the configured value for X3e
is -1.5.
See also
Configuration parameters for Articulated Dependent robot on page 79
Link lengths for Articulated Dependent robot on page 80
Base offsets for Articulated Dependent robot on page 81
A kinematic arm solution is the position of all joints on the robot that correspond
to a Cartesian position. When the Cartesian position is inside the workspace of
the robot, then at least one solution always exists. Many of the geometries have
multiple joint solutions for a single Cartesian position.
• Two axis robots - two joint solutions typically exist for a Cartesian position.
• Three axis robots - four joint solutions typically exist for a Cartesian
position.
See also
Left-arm and right-arm solutions for two-axes robots on page 84
Solution mirroring for three-dimensional robots on page 84
Change the robot arm solution on page 85
 Loading...
Loading...

