Geometries with orientation support
168 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
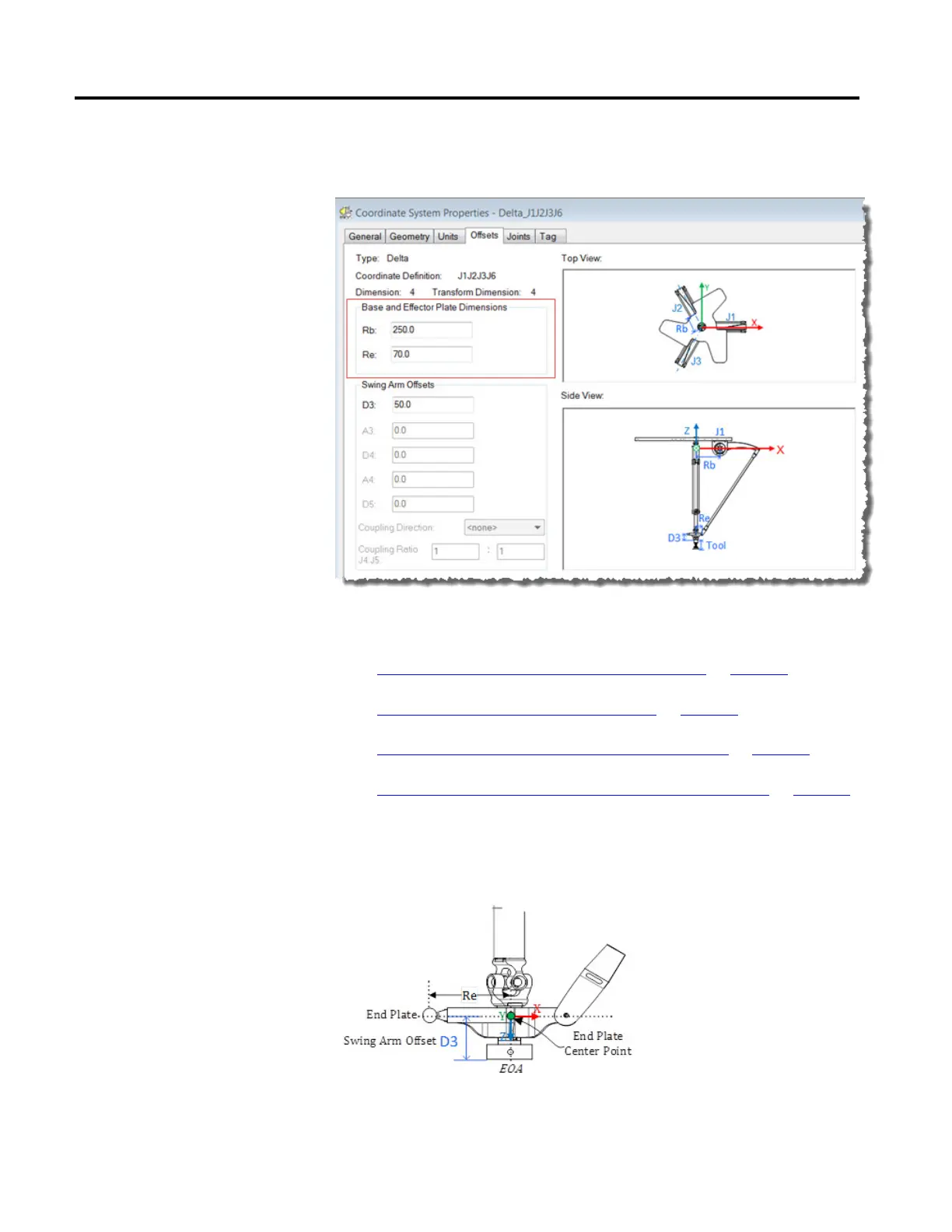
In the Offsets tab in the Coordinate System Properties dialog box, enter the
base offset and effector plate offset for the 4-axis Delta robot.
See also
Configuration parameters for Delta J1J2J3J6 robot on page 165
Swing Arm offsets for Delta J1J2J3J6 robot on page 168
Configuring offset variables in a GSV/SSV instruction on page 169
Configure Zero Angle Orientations for Delta J1J2J3J6 robot on page 170
In the 4-axis Delta robot configuration, only one Swing Arm Offset (D3) is
allowed. The D3 value is the distance on Z axis from the center of end plate to the
J6 axis of rotation.
Swing Arm Offsets for Delta
J1J2J3J6 robot
 Loading...
Loading...

