Geometries with no orientation support
108 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
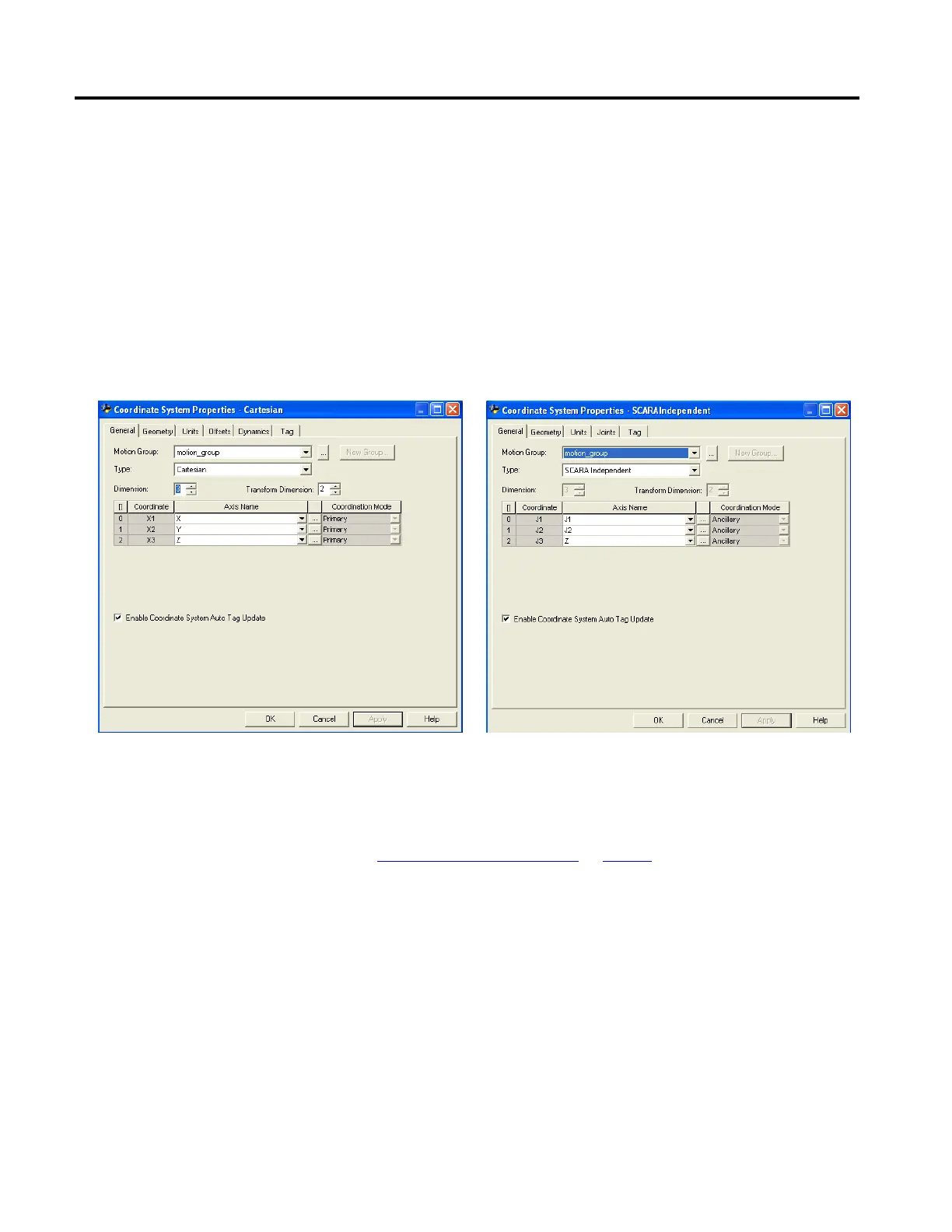
When configuring the parameters for the source coordinate system and the target
coordinate system for a SCARA Independent robot, observe these guidelines:
• The transform dimension value should be set to two for both the source and
target coordinate systems because only J1 and J2 are involved in the
transformations.
• The Z axis is configured as a member of both the source and target
coordinate systems.
For additional information about establishing a reference frame, see Articulated
Independent robot.
Source coordinate system configuration Target coordinate system configuration
See also
Articulated Independent robot on page 65
The work envelope is the three-dimensional region of space that defines the
reaching boundaries for the robot arm. The work envelope for the SCARA
Independent robot is a hollow cylinder with:
• A height equal to the travel limit of the J3 axis.
• An inner radius (R1) equal to |L1-L2|.
Identify the work envelope for
a SCARA Independent robot
 Loading...
Loading...

