Geometries with orientation support
122 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
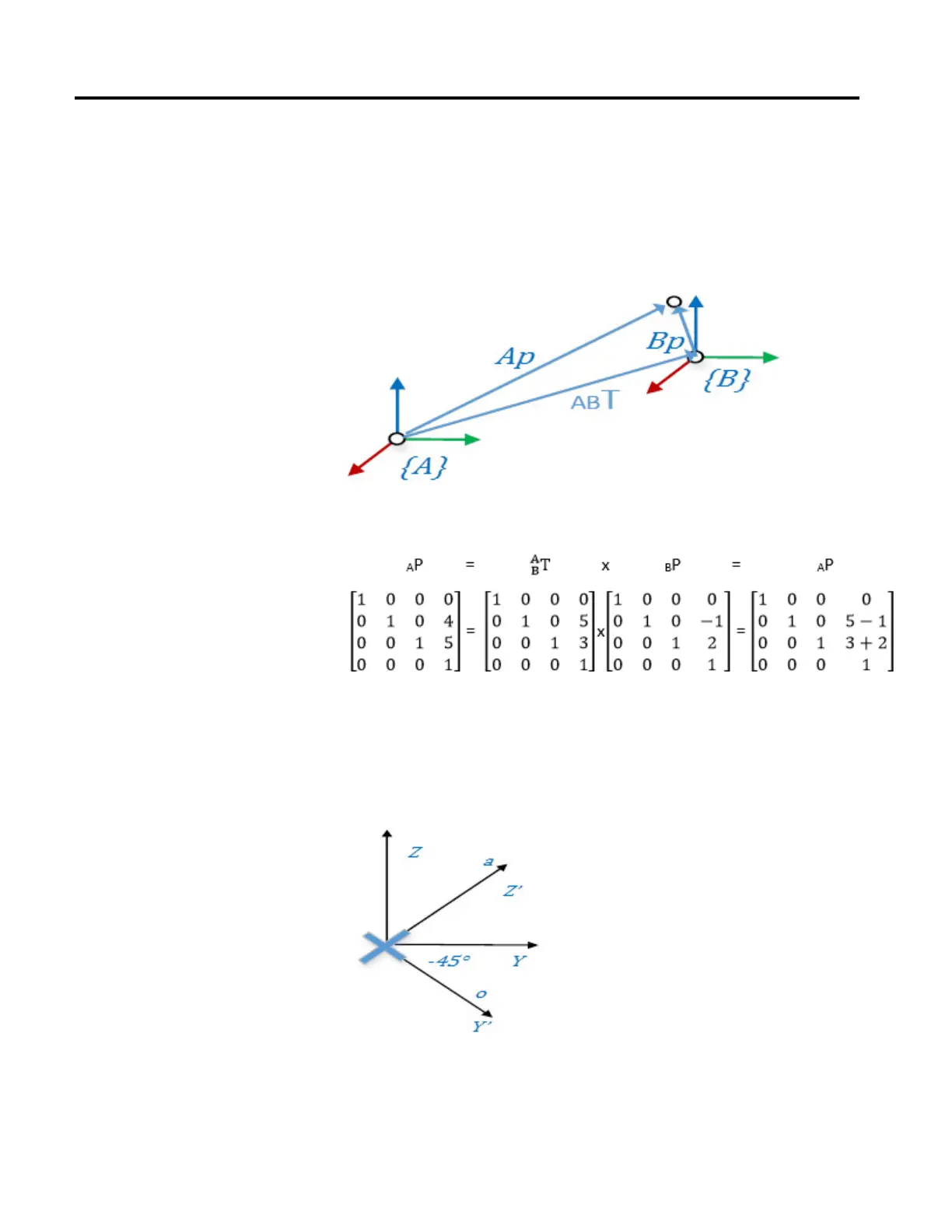
Translation Transform
The translation transform is simpler and shown by the following figure as two
dimensional coordinate transform example in the XZ plane. With 3D space the
example would be a little more complex but can be worked using matrix
multiplication mathematics.
Rotation Transform
Matrix R known as Rotation matrix transforms a base coordinate frame to the
rotated coordinate frame as shown by the rotation around Y axis in the figure
below.
The three rotation matrices which rotate base frame about the three base
coordinate systems are important and rotate the base frame by angle Rx around X,
angle Ry around Y or angle Rz around Z of the base axis as shown below. Notice
that the columns represent the unit vectors of the rotated frame with respect to
 Loading...
Loading...

