Motion control instructions Chapter 17
Rockwell Automation Publication 2080-RM001D-EN-E - February 2015 459
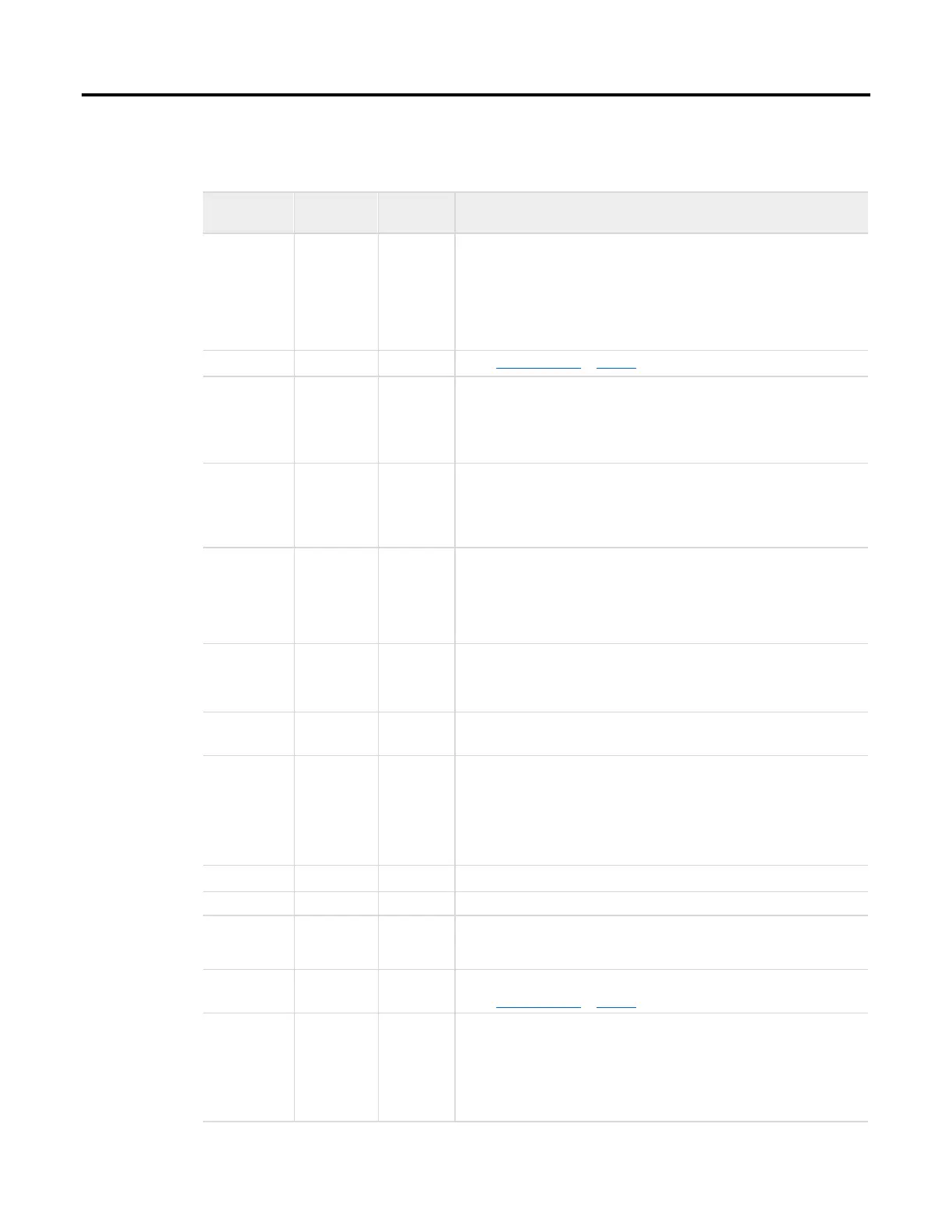
Arguments
Parameter
Parameter
type
Data type Description
EN Input BOOL Function block enable.
When EN = TRUE, execute current MC_MoveAbsolute computation.
When EN = FALSE, there is no computation.
Applies only to LD programs.
AxisIn Input AXIS_REF See also AXIS_REF data type on page 442.
Execute Input BOOL When TRUE, starts the motion at rising edge.
The axis should be in the home position when this execute command is issued or an error
occurs, MC_FB_ERR_NOT_HOMED.
Position Input REAL Target position for the motion in technical unit (negative or positive).
Note: The technical unit is defined in the Motion - General configuration page for an axis.
Velocity Input REAL Value of the maximum velocity.
The maximum velocity may not be reached when Jerk = 0.
The sign of Velocity is ignored, the motion direction is determined by the input Position.
Acceleration Input REAL Value of the acceleration (always positive - increasing energy to the motor.)
user unit/sec
2
Deceleration Input REAL Value of the deceleration (always positive - decreasing energy to the motor).
u/sec
2
Jerk Input REAL Value of the Jerk (always positive).
u/sec
3
Note
: When the value of the input Jerk = 0, the Trapezoid profile is calculated by Motion Engine.
When Jerk > 0, the S-Curve profile is calculated.
Direction Input SINT This parameter is not used.
BufferMode Input SINT This parameter is not used.
ENO Output BOOL Enable out
Applies only to LD programs.
Axis Output AXIS_REF Axis output is read-only in LD programs.
See also AXIS_REF data type on page 442.
Done Output BOOL When TRUE, command position reached.
When the In-Position Input is configured as Enabled for this axis, the drive needs to set In-
Position Input signal active before this Done bit goes to True.
This action completes with velocity zero unless it is aborted.

 Loading...
Loading...







