Chapter 20 Proportional Integral Derivative (PID) instruction
572 Rockwell Automation Publication 2080-RM001D-EN-E - February 2015
No. Step Example
4
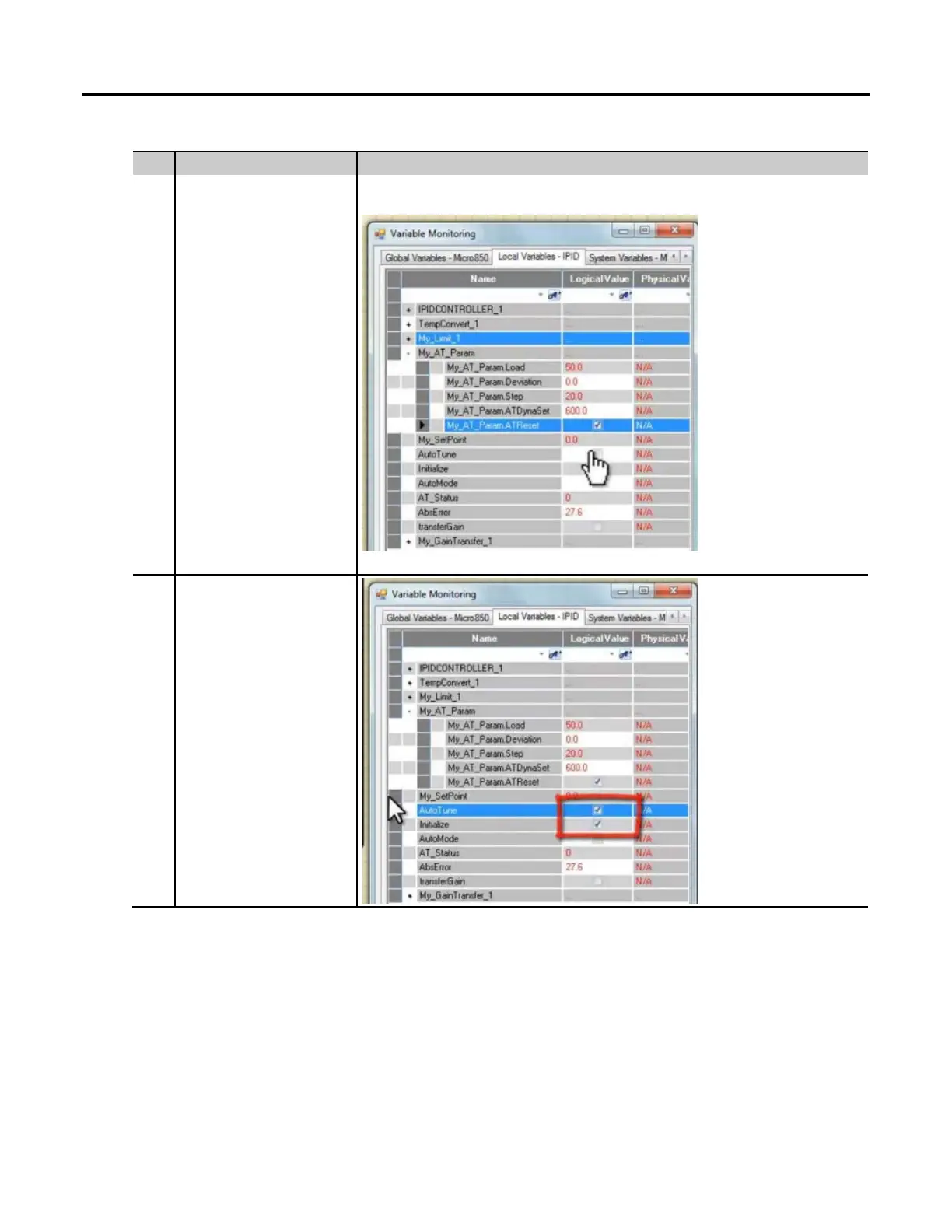
Set Auto-Tune parameters. Set auto-tune parameters including an initial load value, step change for the output, an estimated time to complete
the auto tuning, and the auto-tune reset.
5
Set Initialize and AutoTune to True.

 Loading...
Loading...







