F/T DAQ Installation and Operation Manual
Document #9610-05-1017-06
ATI Industrial Automation, 1031 Goodworth Drive, Apex, NC 27539 USA +1-919-772-0115 www.ati-ia.com
12
1.3 System Components Description
1.3.1 Transducer
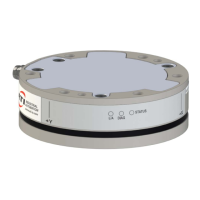
The transducer is a compact, rugged, monolithic structure that converts force and torque into
analog strain gauge signals . The transducer is commonly used as a wrist sensor mounted
between a robot and a robot end-effector. Factory-installed overload pins give Delta and Theta
transducers extra protection from damage due to inadvertent overloads. Figure 1.1 shows the
transducer with a standard tool adaptor.
For further information not in this section see:
- Appendix A for specifications (i.e. resolution, weight).
- Appendix B for mechanical drawings.
- Section 2, Final Installation, for mounting and cable routing.
Figure 1.1—Transducer
Aside:
The transducer is designed to withstand extremely high overloading through its
use of strong materials and quality silicon strain gauges. Some models use a
hardened stainless steel with twice the strength of titanium for overload
protection while other transducers use mechanical overload pins to prevent
damage.
1.3.2 Transducer Cable
The high-flex life transducer cable is electrically shielded to protect transmission from the
transducer Power Supply or Interface Power Supply boxes, small transducers have the cable
integrally attached. Larger transducers have a separate cable [See Figure 1.2].
For further information not in this section see:
- Section 2, Final Installation, for cable routing.
Tool Adaptor Plate (TAP)
Transducer Connecto
Overload Pin (do not attach to)
(Delta & Theta only)
Mounting Adaptor Plate
(MAP)