Object description and parameterization
EL72x1-901x196 Version: 1.9
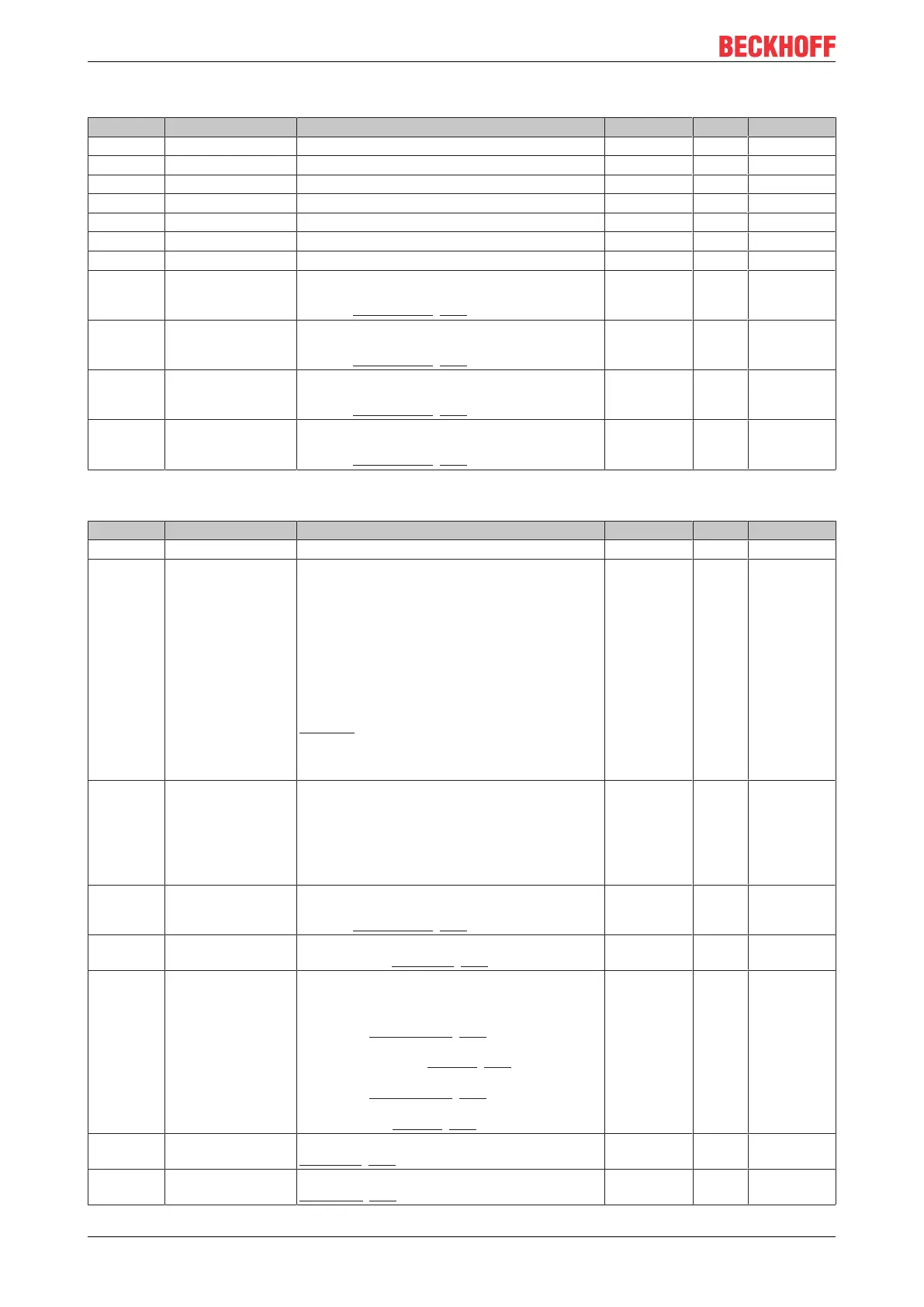
Index 6001 FB Touch probe inputs
Index (hex) Name Meaning Data type Flags Default
6001:0 FB Touch probe inputs Maximum subindex UINT8 RO 0x14 (20
dec
)
6001:01 TP1 Enable Touchprobe 1 switched on BOOLEAN RO 0x00 (0
dec
)
6001:02 TP1 pos value stored Positive value of Touchprobe 1 saved BOOLEAN RO 0x00 (0
dec
)
6001:03 TP1 Neg value stored Negative value of Touchprobe 1 saved BOOLEAN RO 0x00 (0
dec
)
6001:09 TP2 Enable Touchprobe 2 switched on BOOLEAN RO 0x00 (0
dec
)
6001:0A TP2 pos value stored Positive value of Touchprobe 2 saved BOOLEAN RO 0x00 (0
dec
)
6001:0B TP2 neg value stored Negative value of Touchprobe 2 saved BOOLEAN RO 0x00 (0
dec
)
6001:11 TP1 pos position Positive value of Touchprobe 1
Unit: the given value must be multiplied by the corre-
sponding scaling factor [}130]
UINT32 RO 0x00000000
(0
dec
)
6001:12 TP1 neg position Negative value of Touchprobe 1
Unit: the given value must be multiplied by the corre-
sponding scaling factor [}130]
UINT32 RO 0x00000000
(0
dec
)
6001:13 TP2 pos position Positive value of Touchprobe 2
Unit: the given value must be multiplied by the corre-
sponding scaling factor [}130]
UINT32 RO 0x00000000
(0
dec
)
6001:14 TP2 neg position Negative value of Touchprobe 2
Unit: the given value must be multiplied by the corre-
sponding scaling factor [}130]
UINT32 RO 0x00000000
(0
dec
)
Index 6010 DRV Inputs
Index (hex) Name Meaning Data type Flags Default
6010:0 DRV Inputs Maximum subindex UINT8 RO 0x13 (19
dec
)
6010:01 Statusword Statusword
Bit 0: Ready to switch on
Bit 1: Switched on
Bit 2: Operation enabled
Bit 3: Fault
Bit 4: reserved
Bit 5: Quick stop (inverse)
Bit 6: Switch on disabled
Bit 7: Warning
Bit 8 + 9: reserved
Bit 10: TxPDOToggle (selection/deselection via
0x8010:01)
Bit 11: Internal limit active
Bit 12: (Target value ignored)
Bit 13 - 15: reserved
UINT16 RO 0x0000 (0
dec
)
6010:03 Modes of operation
display
Modes of operation display.
Permitted values:
9: Cyclic synchronous velocity mode (CSV)
10: Cyclic synchronous torque mode (CST)
11: Cyclic synchronous torque mode with commutation
angle (CSTCA)
UINT8 RO 0x00 (0
dec
)
6010:06 Following error actual
value
Following error
Unit: the given value must be multiplied by the corre-
sponding scaling factor [}130]
INT32 RO 0x00000000
(0
dec
)
6010:07 Velocity actual value Display of the current velocity value
Unit: see Index 0x9010:14 [}201]
INT32 RO 0x00000000
(0
dec
)
6010:08 Torque actual value Display of current torque value
The value is specified in 1000th of the rated current
(0x8011:12)
Equation for index 8010:54 [}190] = 0 :
M = ((Torque actual value / 1000) x (rated current /
√2)) x torque constant (8011:16 [}193])
Equation for index 8010:54 [}190] = 1 :
M = ((Torque actual value / 1000) x rated current)) x
torque constant (8011:16 [}193])
INT16 RO 0x0000 (0
dec
)
6010:12 Info data 1 Synchronous information (selection via subindex
0x8010:39 [}190])
UINT16 RO 0x0000 (0
dec
)
6010:13 Info data 2 Synchronous information (selection via subindex
0x8010:3A [}190])
UINT16 RO 0x0000 (0
dec
)

 Loading...
Loading...









