Object description and parameterization
EL72x1-901x198 Version: 1.9
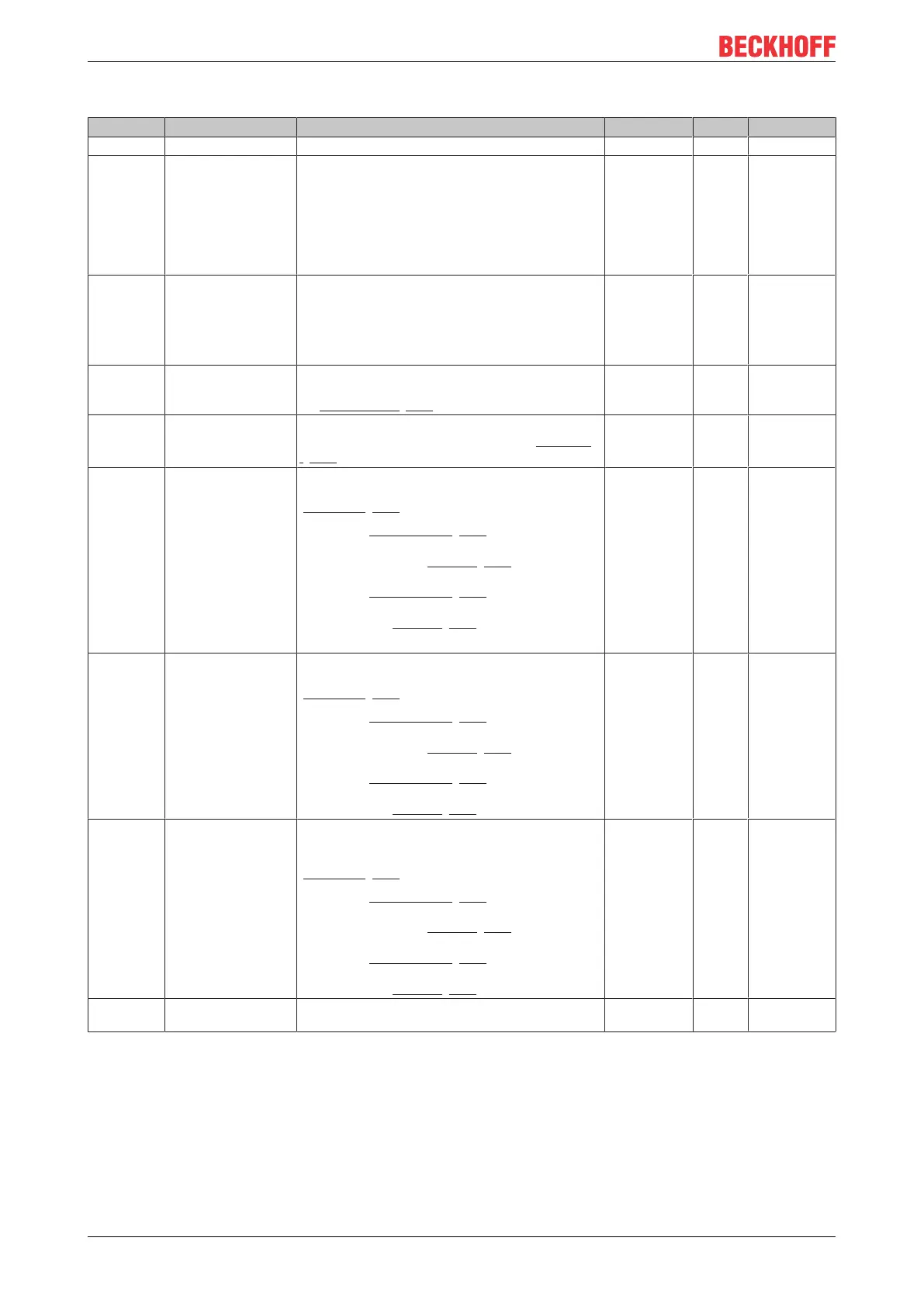
Index 7010 DRV Outputs
Index (hex) Name Meaning Data type Flags Default
7010:0 DRV Outputs Maximum subindex UINT8 RO 0x0E (14
dec
)
7010:01 Controlword Controlword
Bit 0: Switch on
Bit 1: Enable voltage
Bit 2: Quick stop (inverse)
Bit 3: Enable operation
Bit 4 - 6: reserved
Bit 7: Fault reset
Bit 8 - 15: reserved
UINT16 RO 0x0000 (0
dec
)
7010:03 Modes of operation Permitted values:
0x08: Cyclic synchronous position mode (CSP)
0x09: Cyclic synchronous velocity mode (CSV)
0x0A: Cyclic synchronous torque mode (CST)
0x0B: Cyclic synchronous torque mode with commuta-
tion angle (CSTCA)
UINT8 RW 0x00 (0
dec
)
7010:05 Target position Configured target position
Unit: the value must be multiplied by the correspond-
ing scaling factor [}130]
INT32 RW 0x00000000
(0
dec
)
7010:06 Target velocity Configured target velocity
The velocity scaling can be found in object 0x9010:14
[}201] (Velocity encoder resolution)
INT32 RO 0x00000000
(0
dec
)
7010:09 Target torque Configured input value for torque monitoring
The value is specified in 1000th of the rated current
(0x8011:12 [}194])
Equation for index 8010:54 [}190] = 0 :
M = ((Torque actual value / 1000) x (rated current /
√2)) x torque constant (8011:16 [}193])
Equation for index 8010:54 [}190] = 1 :
M = ((Torque actual value / 1000) x rated current)) x
torque constant (8011:16 [}193])
INT16 RO 0x0000 (0
dec
)
7010:0A Torque offset Torque value offset
The value is specified in 1000th of the rated current
(0x8011:12 [}194])
Equation for index 8010:54 [}190] = 0 :
M = ((Torque actual value / 1000) x (rated current /
√2)) x torque constant (8011:16 [}193])
Equation for index 8010:54 [}190] = 1 :
M = ((Torque actual value / 1000) x rated current)) x
torque constant (8011:16 [}193])
INT16 RO 0x0000 (0
dec
)
7010:0B Torque limitation Torque threshold value for torque monitoring (bipolar
limit)
The value is specified in 1000th of the rated current
(0x8011:12 [}194])
Equation for index 8010:54 [}190] = 0 :
M = ((Torque actual value / 1000) x (rated current /
√2)) x torque constant (8011:16 [}193])
Equation for index 8010:54 [}190] = 1 :
M = ((Torque actual value / 1000) x rated current)) x
torque constant (8011:16 [}193])
UINT16 RW 0x7FFF
(32767
dec
)
7010:0E Commutation angle Commutation angle (for CSTCA mode)
Unit: 360° / 2
16
UINT16 RO 0x0000 (0
dec
)

 Loading...
Loading...









