Object description and parameterization
EL72x1-901x216 Version: 1.9
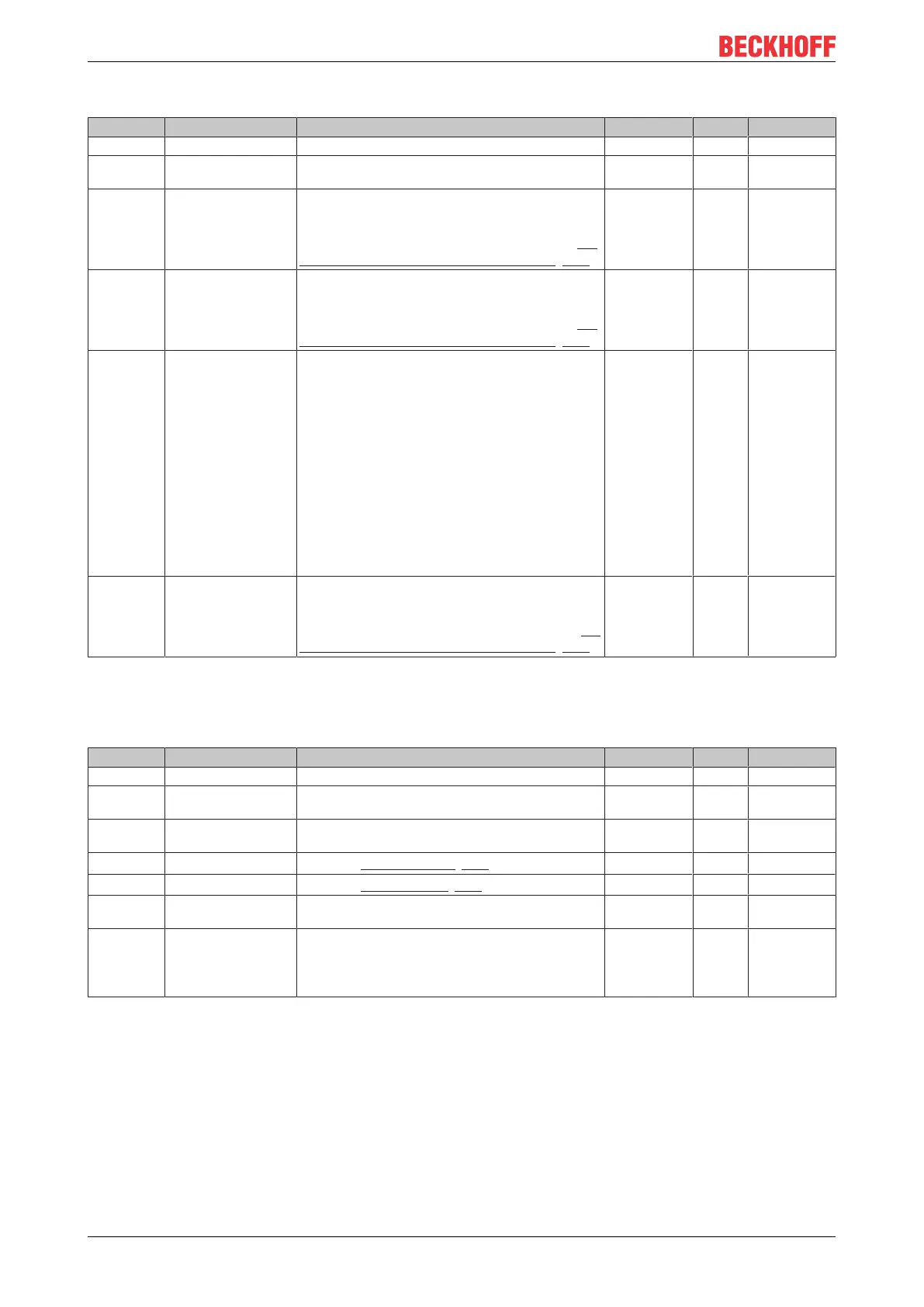
Index 2004 Brake Settings
Index (hex) Name Meaning Data type Flags Default
2004:0 Brake Settings Maximum subindex UINT8 RO 0x14 (20
dec
)
2004:01 Manual override (re-
lease)
Manual release of the motor holding brake BOOLEAN RW 0x00 (0
dec
)
2004:11* Release delay Time the holding brake requires for opening (releasing)
after the voltage was applied
This value is affected by automatic scanning. (see Au-
tomatic scanning of the electronic type plates [}143])
UINT16 RW 0x0000 (0
dec
)
2004:12* Application delay Time the holding brake requires for closing (holding)
after the voltage was switched off
This value is affected by automatic scanning. (see Au-
tomatic scanning of the electronic type plates [}143])
UINT16 RW 0x0000 (0
dec
)
2004:13 Emergency application
timeout
Time the amplifier waits, until the rotation speed
reaches the stand still window after stop request (set
rotation speed 0 or Torque off). If the set waiting time
is exceeded, the holding brake is triggered indepen-
dently of the rotation speed.
Note:
For rotatory axes and the setting „torque off“ in error
case, this parameter has to be set at least to the „coast
to the stop“ time of the axis.
For suspended (hanging) axes and the setting „torque
off“ in error case, this parameter has to be set to an
appropriate short time, to prevent the axis/load from
drop/fall.
UINT16 RW 0x0000 (0
dec
)
2004:14* Brake moment of iner-
tia
Mass moment of inertia of the brake
Unit: g cm^2
This value is affected by automatic scanning. (see Au-
tomatic scanning of the electronic type plates [}143])
UINT16 RW 0x0000 (0
dec
)
*) see index 2059 FB OCT Nameplate
Index 2010 Feedback Settings
Index (hex) Name Meaning Data type Flags Default
2010:0 Feedback Settings Maximum subindex UINT8 RO 0x13 (19
dec
)
2010:01 Invert feedback direc-
tion
Inverting the count direction BOOLEAN RW 0x00 (0
dec
)
2010:11 Device type 3: OCT (not changeable) UINT32 RW 0x00000003
(3
dec
)
2010:12 Single-turn bits
Number of singlei-turn-bits [}127]
UINT8 RW 0x14 (20
dec
)
2010:13 Multi-turn bits
Number of multi-turn-bits [}127]
UINT8 RW 0x0C (12
dec
)
2010:14 Observer bandwidth Bandwidth of observer [Hz] UINT16 RW 0x01F4
(500
dec
)
2010:15 Observer feed-forward Load ratio[%]
100 % = free of load
50 % = moments of inertia of input and output are
equal
UINT8 RW 0x01 (0
dec
)

 Loading...
Loading...









