Initial commissioning
4–10
1070 066 037-101 (00.02) GB
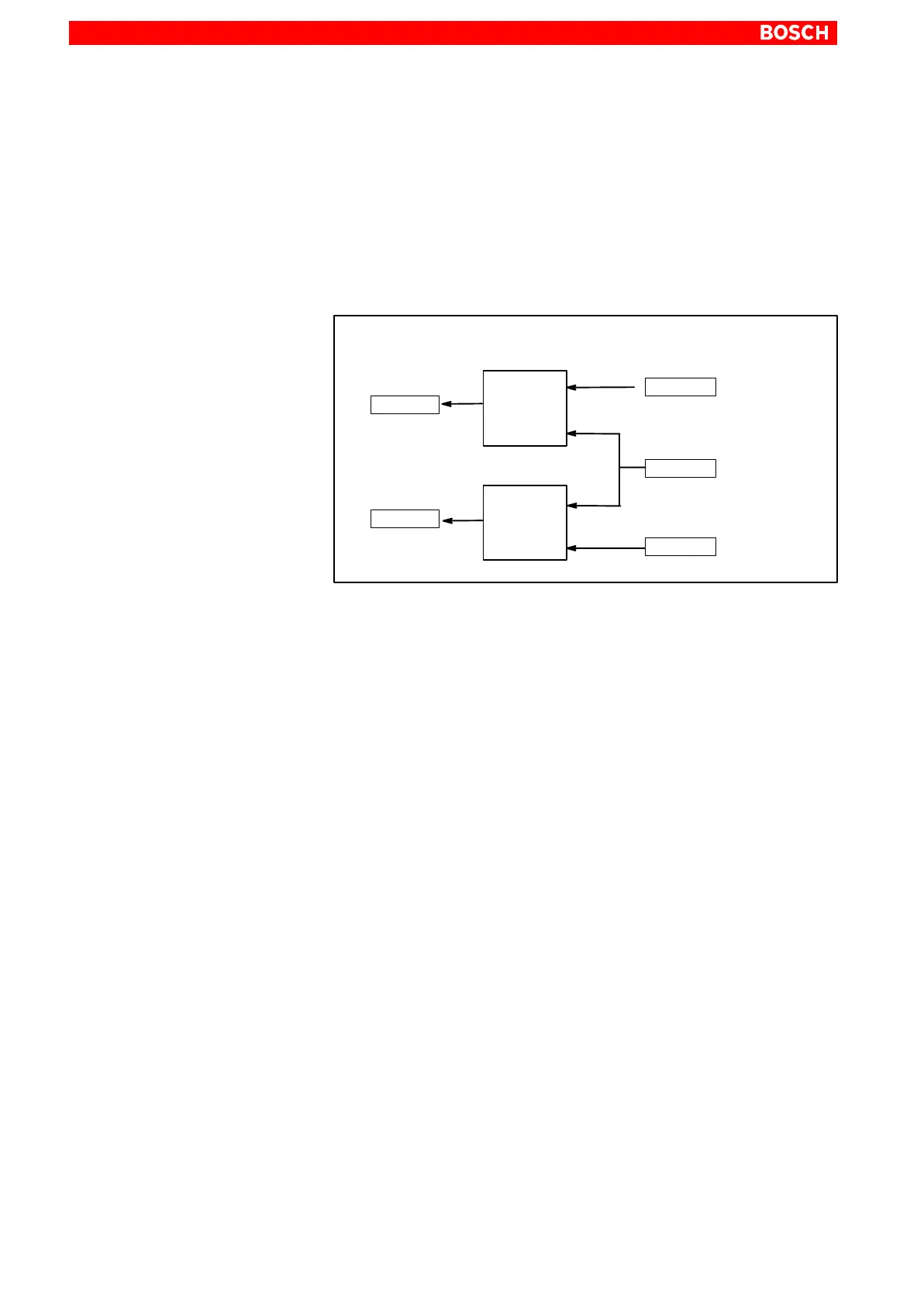
4.2.9 Torque monitoring
Every drive is equipped with 2 monitoring features each of which can be con-
figured independently.
Every monitoring feature compares the current torque value with its specific
limit values and stores the result of the comparison in a separate parameter.
Since both parameters have been implemented as real-time bits (signal sta-
tus bits), one of them can be assigned to the hardware output OUT1 of the
drive and evaluated, e.g. by the PLC.
S-0-0092
S-0-0084
S-0-0126
S-0-0334
torque actual
value
Md
limit
|Md|
Torque limit
values:
Message
|Md| Md
limit
S-0-0333
torque threshold
Md
x
Message
|Md| Md
x
|Md|
(bipolar)
If one of the monitoring features responds (= contents of S-0-0333 or
S-0-0334 becomes HIGH), the drive internally responds by setting certain
bits in parameter S-0-0013 (diagnostics class 3).
Further reactions (such as reduction of torque or speed, retract move-
ments, EMERGENCY-STOP) have to be initiated externally by the PLC!
Adjust the limit values for torque monitoring to your requirements.
Assign parameters S-0-0333 or S-0-0334 to hardware output OUT1 of the
drive in order to provide for evaluation (cf. page 4–8).
Execute the ”Save main memory” command.