Parameter
structure
Keypad and
display
Parameter x.00
Parameter description
format
Advanced parameter
descriptions
Serial comms
protocol
Performance
Menu 1
Mentor MP Advanced User Guide 31
Issue Number: 4 www.controltechniques.com
Although most parameters can be controlled from analog inputs, these two parameters are a special case in that if an analog input is directed to one
of these parameters, the scan rate of that analog input is increased.
These are special parameters when a non-bit type quantity uses these parameters as a destination (not just from analog inputs). The scaling and
limiting applied is as described with Pr 1.08 on page 25.
See Pr 1.09 on page 26.
This parameter indicates the velocity feed forward reference when position control is used (see section 5.14 Menu 13: Position control on page 172).
This bit indicates that the position controller has selected the velocity feed forward as a reference for the drive
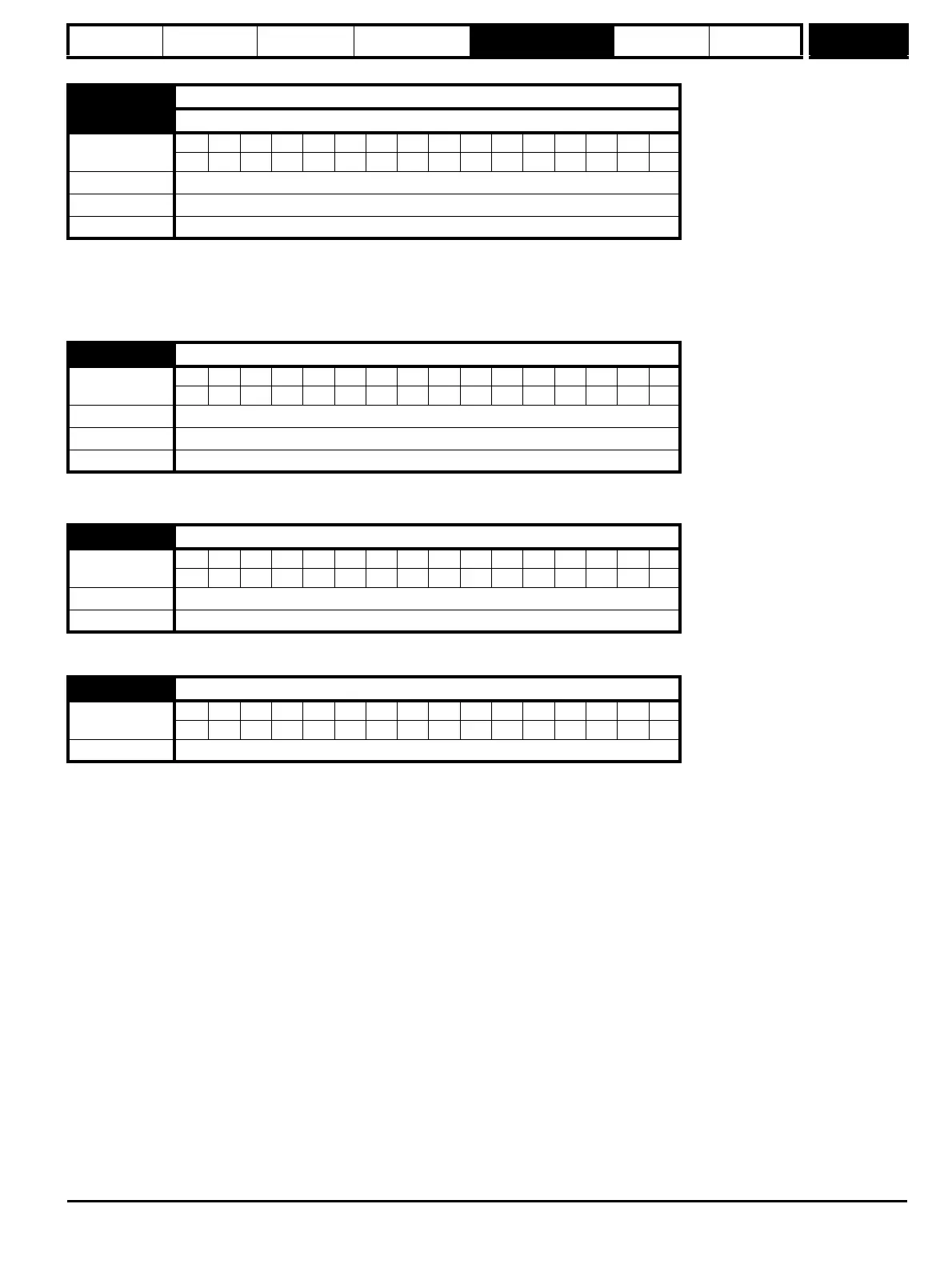
1.36 Analog reference 1
1.37 Analog reference 2
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111 1
Range ±MAX_SPEED_REF rpm
Default 0
Update rate 4 ms write
1.38 Percentage trim
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
21 1
Range ±100.00 %
Default 0.00
Update rate 4 ms read
1.39 Velocity feed-forward reference
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1111
Range ±10,000.0 rpm
Update rate 4 ms read
1.40 Feed-forward selected
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 111
Update rate 4 ms write