11.2.7.2 Control Structure in Flux Sensorless
+
_
+
_
130BA053.11
Ref.
Cong. mode
P 1-00
P 7-20 Process feedback
1 source
P 7-22 Process feedback
2 source
Process
PID
P 4-11 Motor speed
low limit [RPM]
P 4-12 Motor speed
low limit [Hz]
P 4-14 Motor speed
high limit [Hz]
P 4-13 Motor speed
high limit [RPM]
Low
High
Ramp
P 3-**
+f max.
P 4-19
Max. output
freq.
Motor
controller
-f max.
Speed
PID
P 7-0*
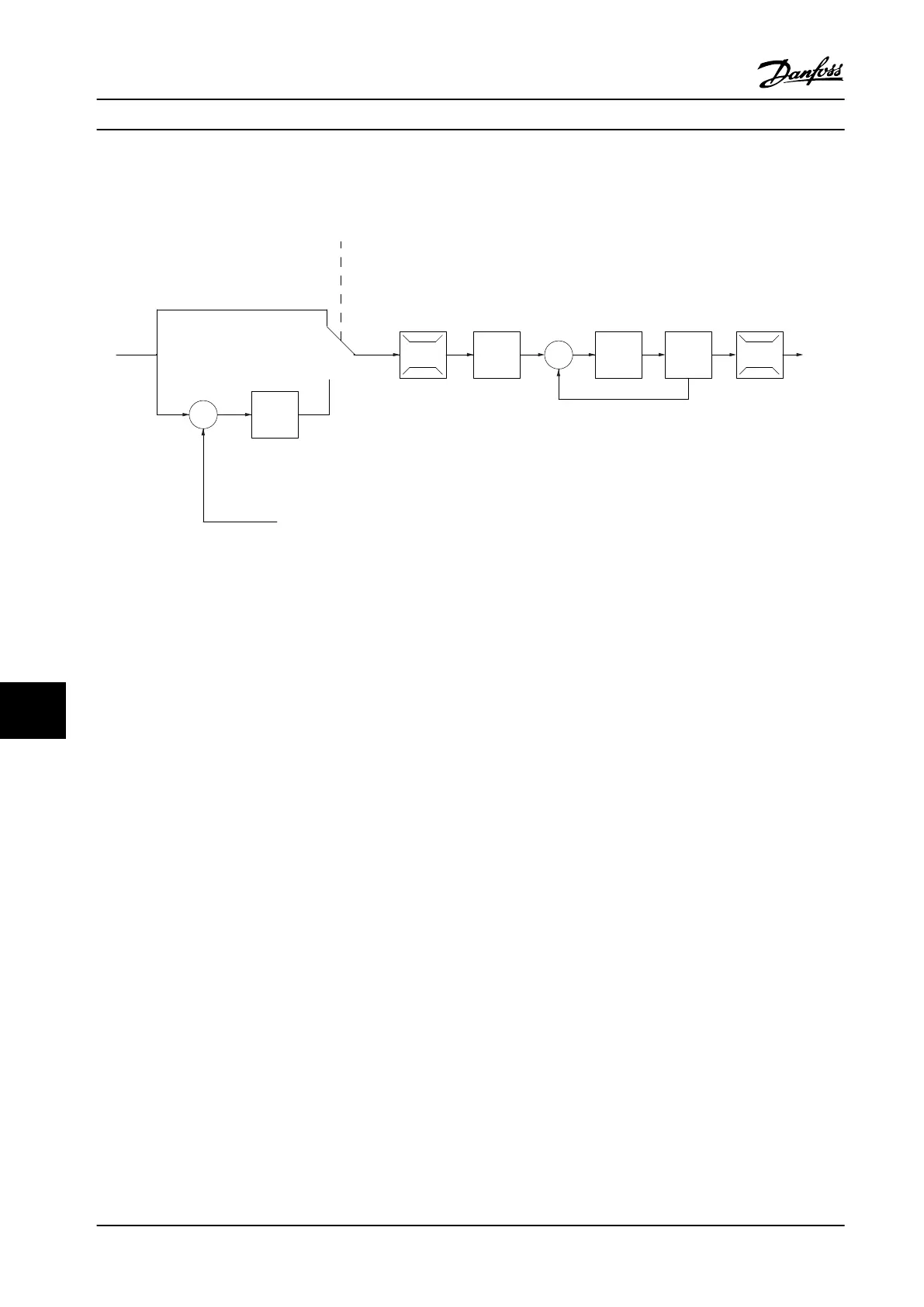
Figure 11.9 Control Structure in Flux Sensorless Open Loop and Closed-loop Congurations
In Figure 11.9, the resulting reference from the reference handling system is fed through the ramp and speed limitations as
determined by the parameter settings indicated.
Parameter 1-01 Motor Control Principle is set to [2] Flux Sensorless and parameter 1-00 Conguration Mode is set to [0] Speed
open loop. An estimated speed feedback is generated to the speed PID to control the output frequency. The speed PID must
be set with its P, I, and D parameters (parameter group 7-0* Speed PID control).
Select [3] Process in parameter 1-00 Conguration Mode to use the process PID control for closed-loop control of the
controlled application. The process PID parameters are found in parameter groups 7-2* Process Ctrl. Feedb and 7-3* Process
PID Ctrl.
Basic Operating Principles ...
VLT
®
AQUA Drive FC 202
196 Danfoss A/S © 01/2018 All rights reserved. MG22B222
1111

 Loading...
Loading...


















