0.0 Hz
*
[0.0 - 10.0 Hz] Set frequency required for normal magnetizing current. If fre-
quency is set lower than motor slip frequency, par. 1-50,
Motor
Magnetizing at Zero Speed
is inactive.
1-55 U/f Characteristic - U
Range: Function:
This parameter is an array parameter [0-5] and is only func-
tional when par. 1-01,
Motor Control Principle
is set to
U/f
[0].
0.0 V
*
[0.0 - 999.9 V] Enter voltage at each frequency point to manually form a U/f
characteristic matching motor. Frequency points are defined in
par. 1-56,
U/f characteristics - F
.
1-56 U/f Characteristic - F
Range: Function:
This parameter is an array parameter [0-5] and is only func-
tional when par. 1-01,
Motor Control Principle
is set to
U/f
[0].
0.0 Hz
*
[0.0 - 1000.0 Hz] Enter frequency points to manually form a U/f characteristic
matching motor. Voltage at each point is defined in par. 1-55,
U/f Characteristic - U
.
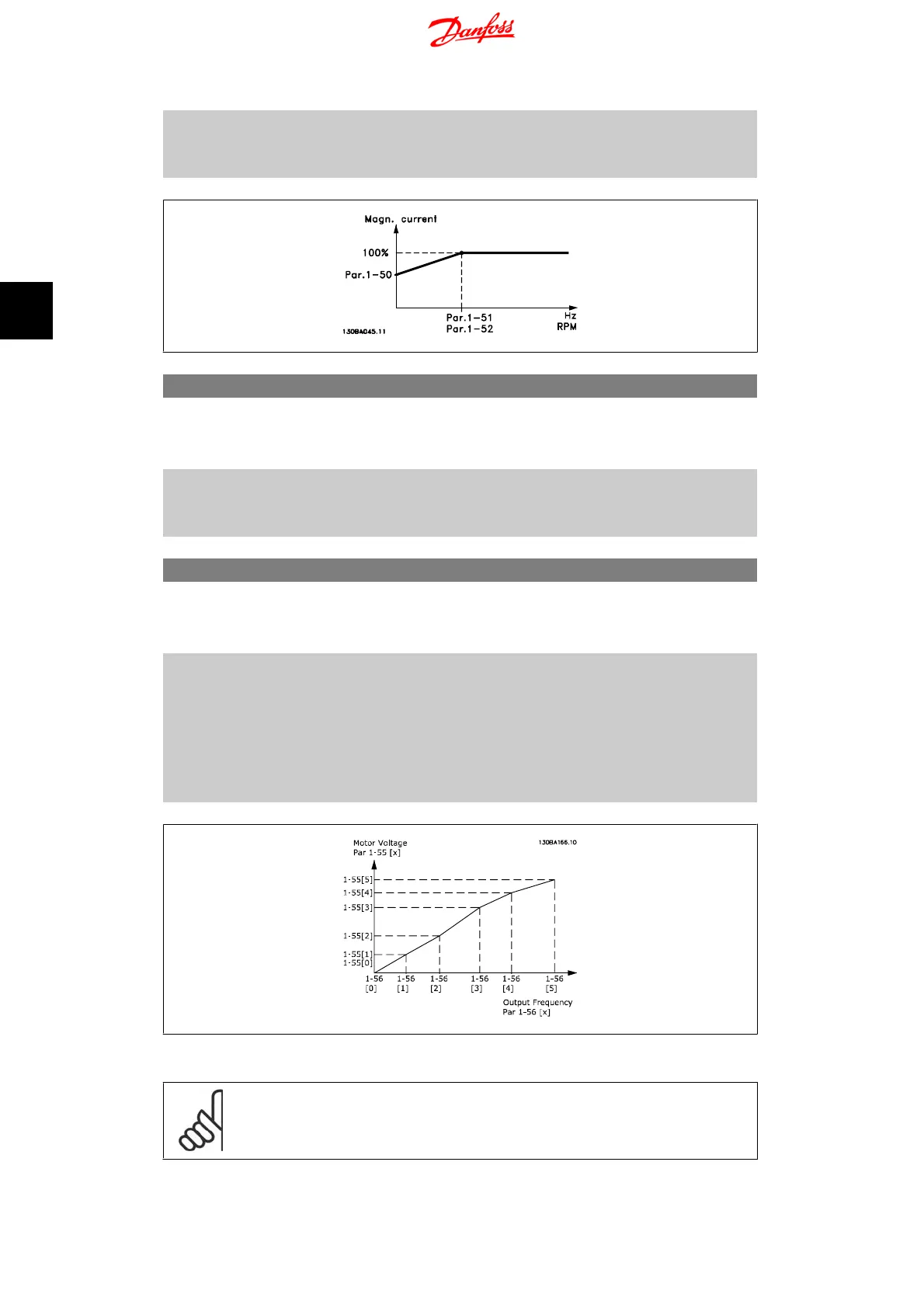
Make a U/f characteristic based on 6 definable voltages and fre-
quencies, see below figure.
Simplify U/f characteristics by merging 2 or more points (vol-
tages and frequencies), respectively, are set equal.
Illustration 4.1: Fig. 1 U/f characteristics
NB!
For par. 1-56 the following applies
[0] ≦ [1] ≦ [2] ≦ [3] ≦ [4] ≦ [5]
4. Parameter Descriptions VLT Micro Drive FC 51
22
MG.02.C2.02 - VLT
®
is a registered Danfoss trademark
4
 Loading...
Loading...









