4.2.4. 1-6* Load Dependent setting
Parameters for adjusting the load dependent motor settings.
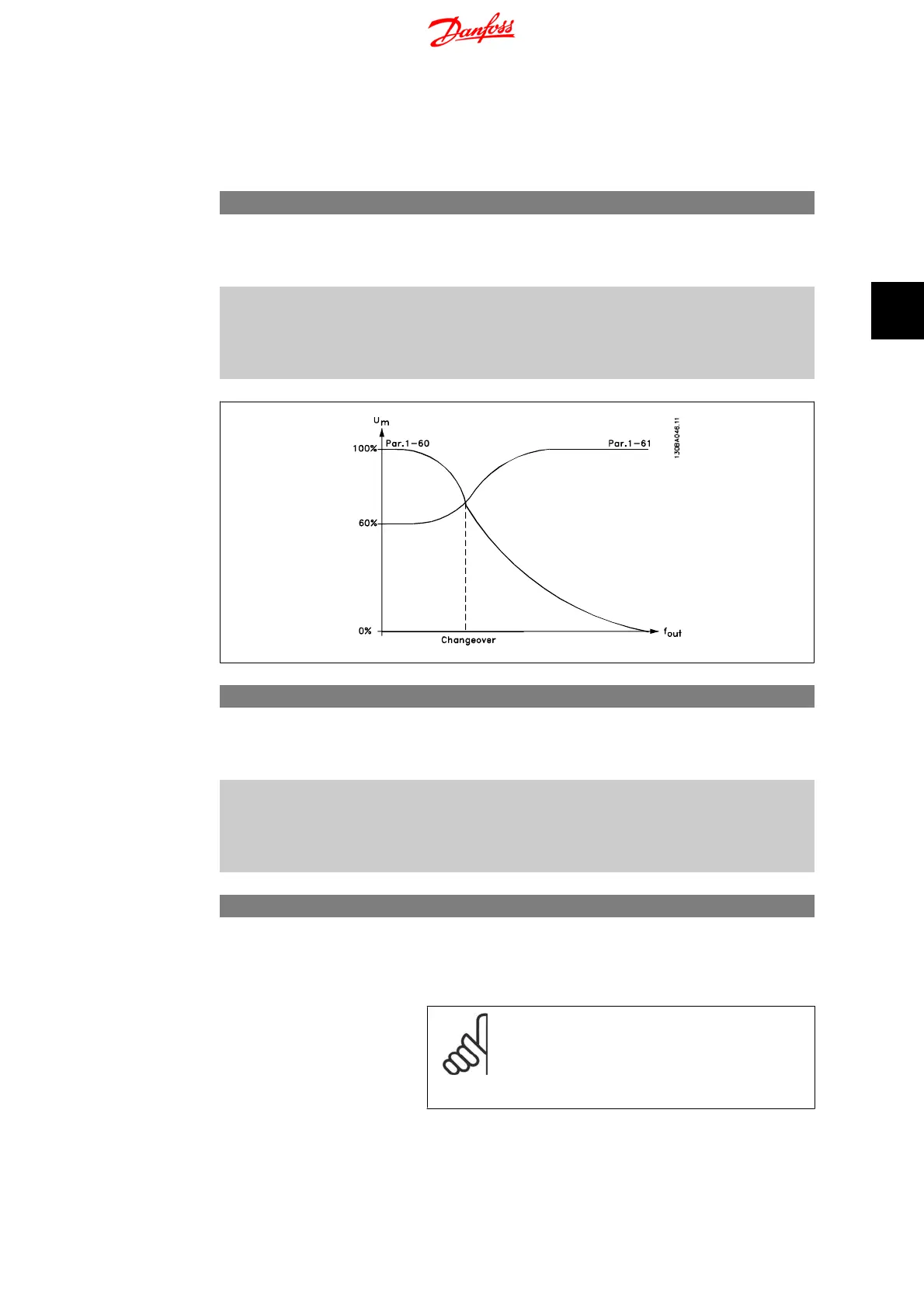
1-60 Low Speed Load Compensation
Range: Function:
Use this parameter to gain optimum U/f characteristic when
running at low speed.
100 %
*
[0-199 %] Enter percentage in relation to load when motor runs at low
speed.
Change-over point is automatically calculated based on motor
size.
1-61 High Speed Load Compensation
Range: Function:
Use this parameter to obtain optimum load compensation when
running at high speed.
100 %
*
[0 - 199 %] Enter percentage to compensate in relation to load when motor
runs at high speed.
Change-over point is automatically calculated based on motor
size.
1-62 Slip Compensation
Range: Function:
100 %
*
[-400 - 399 %] Compensation for load dependent motor slip.
Slip compensation is calculated automatically based on rated
motor speed, n
M,N
.
NB!
This function is only active when par. 1-00,
Con-
figuration Mode
, is set to
Speed Open Loop
[0],
and when par. 1-01,
Motor Control Principle
, is set
to
VVC+
[1].
VLT Micro Drive FC 51 4. Parameter Descriptions
MG.02.C2.02 - VLT
®
is a registered Danfoss trademark
23
4
 Loading...
Loading...









