Chapter 10 Motion Control Function
1
instruction will be blended according to the setting value of BufferMode without any impact on the
execution of MC_MoveSuperimposed or MC_HaltSuperimposed.
Example: Using two MC_MoveRelative instructions for explanation.
The maximum velocity of the first MC_MoveRelative instruction is V
1
and distance is S
1
. The maximum
velocity of the second MC_MoveRelative instruction is V
2
and distance is S
2
. Modifying the value of
BufferMode of the second MC_MoveRelative instruction, you can get different blending processes of the two
instructions. See details as below.
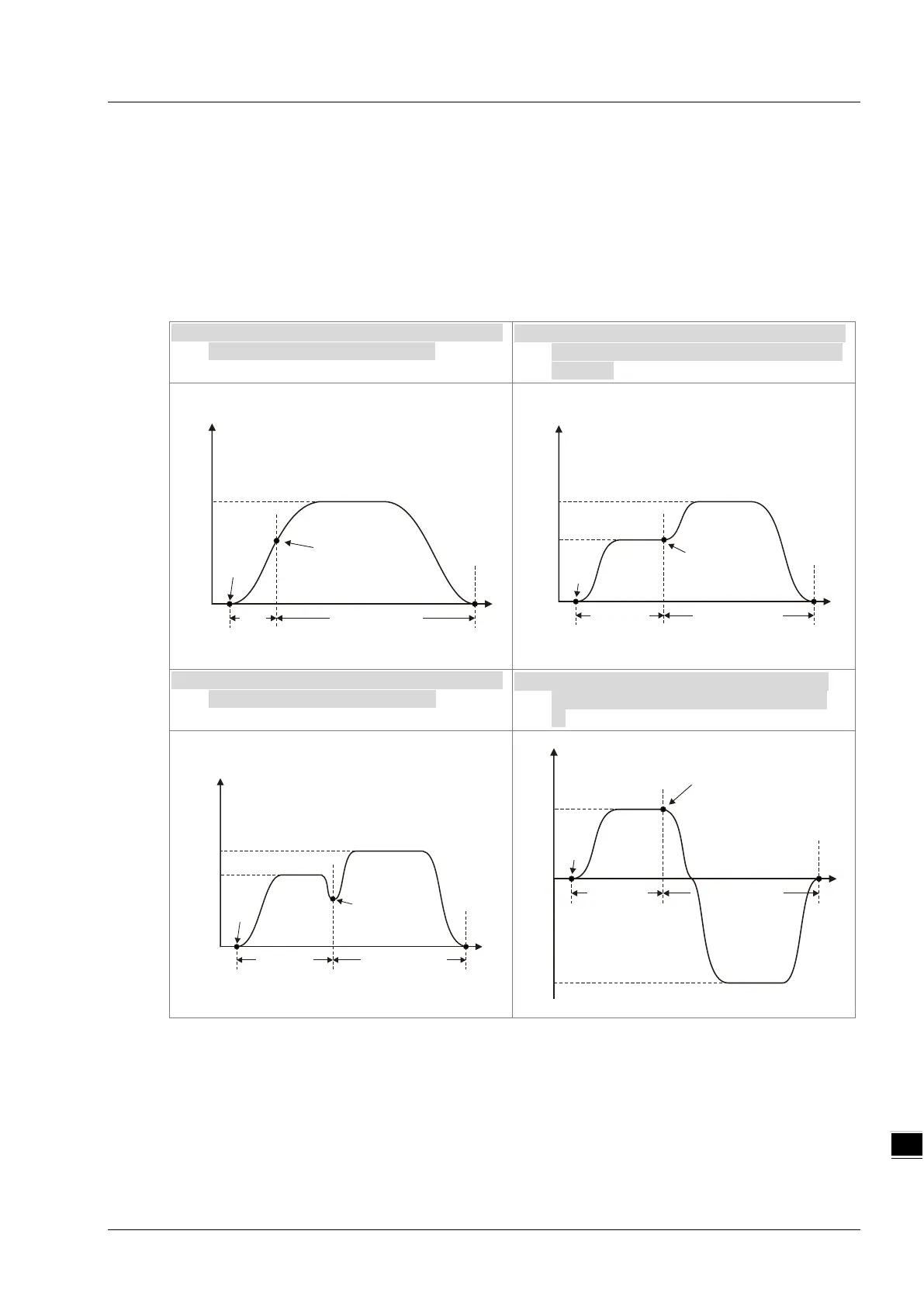
Aborting: Buffermode=mcAborting. See the examples of four cases as below.
1. Current instruction is aborted while the
controlled axis is accelerating.
2. Current instruction is aborted while the
controlled axis is moving at a constant
3. Current instruction is aborted while the
controlled axis is decelerating.
4. The velocity direction of the buffered
instruction is opposite to the current
t
Curr ent
instruction
is started
The buffer ed instruction is star ted
and then starts to control the
axis im mediately.
Buffered instruction
V
Current
instruction
V
2
t
The buffered i nstruction is started
and then starts to control the
axis immediately.
Buffer ed instruction
V
Current
instruction
is star ted
Curr ent
instruction
V
2
V
1
t
Curr ent
instruction
is started
The buffered instruction is started
and then starts to control the
axis immediately.
Buffered instruction
V
Current
instruction
V
2
V
1
t
The buffered instru ction is starte d
a nd the n sta rts t o contro l the
axis imme dia tely.
Buffered instruction
V
Current
instruction
is started
Current
instruction
V
1
V
2
10-7