DVP15MC11T Operation Manual
2
1
Rel_Bsy
Rel_Act
Rel_Abt
Rel_Err
Rel_ErrID
Rel_Done
Rel_Ex
Axis1
5000.0
300.0
100.0
100.0
15.0
Rel_BM
MC_MoveRelative
Axis Done
Rel
Execute
ContinuousUpdate
Busy
Active
Distance CommandAborted
Error
ErrorIDAcceleration
Deceleration
Jerk
BufferMode
Velocity
Axis1
True
True
Pwr_BM
Pwr_Bsy
Pwr_Act
Pwr_Err
Pwr_ErrID
Pwr_En
Pwr_Sta
MC_Power
Axis Status
Pwr
Enable
EnablePositive
Busy
Active
EnableNegative
BufferMode
Error
ErrorID
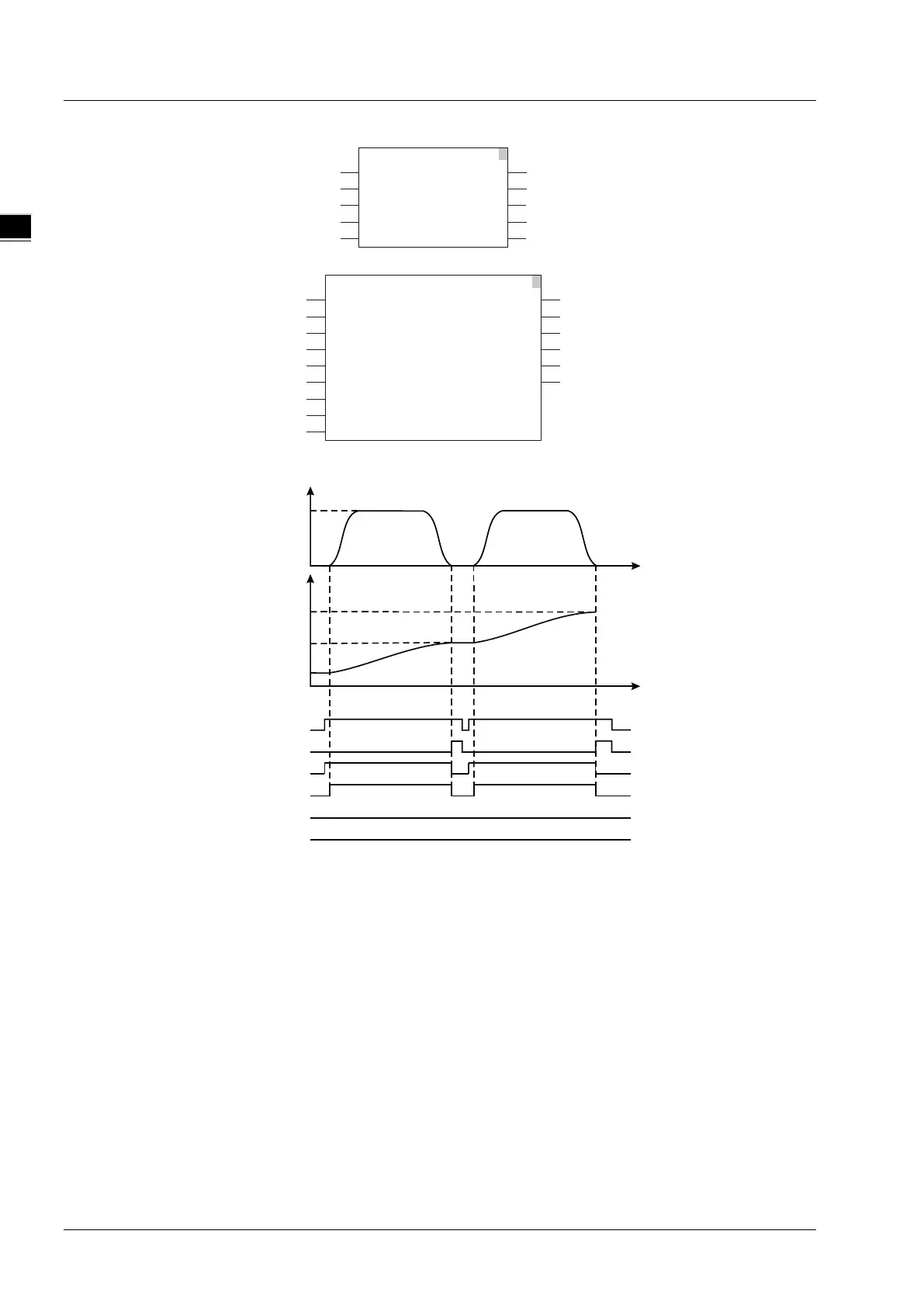
2. Motion Curve and Timing Chart
MC_MoveRelative instruction is executed for the first time when Rel_Ex changes from FALSE to
TRUE for the first time. At the moment, the current position of the axis is 2000 and the target
position is 7000 (7000=2000+5000).
When the axis position of 7000 is reached, the instruction execution is finished and Done
changes to TRUE.
MC_MoveRelative instruction starts its second-time execution when Rel_Ex changes from
FALSE to TRUE for the second time. At the moment, the current position of the axis is 7000 and
the target position is 12000 (12000=7000+5000).
When the axis position of 12000 is reached, the second-time execution of the instruction is
completed and Done changes to TRUE for the second time.
300
2000
7000
12000
Rel_Ex
Rel_Done
Rel_Bsy
Rel_Act
Rel_Abt
Rel_Err
Position
Velocity
Time
Time
Rel
11-40