DVP15MC11T Operation Manual
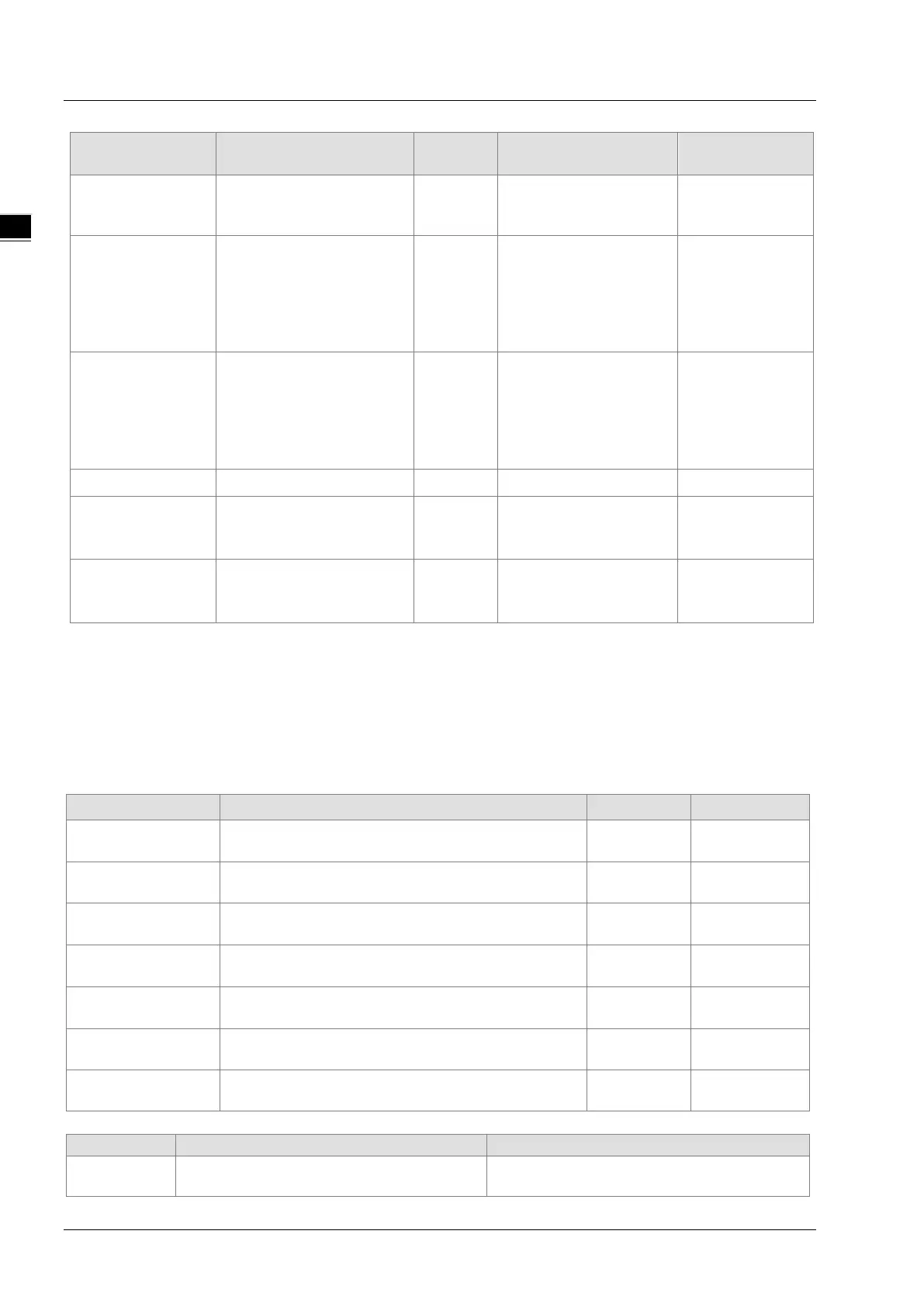
Parameter name Function Data type
Validation timing
the slave axis performs the
engagement action
.
Specify the maximum
acceleration of the slave
axis
during the period when
the slave axis performs the
engagement action.
2
LREAL
Positive number
(
be set)
Execute
from
to TRUE
Specify the maximum
deceleration of the slave
axis
during the period when
the slave axis performs the
engagement action.
2
.
LREAL
Positive number
(
be set)
Execute
from
to TRUE
- - -
Specify the type of the
master axis position in the
electronic cam calculation
.
MC_SOUR
CE
1:mcActualValue
Execute
from
to TRUE
behavior when
two instructions.
MC_Buffer
_Mode
1: mcBuffered
Execute
from
to TRUE
Note:
1. The MC_CamIn instruction execution starts when Execute changes from FALSE to TRUE.
Changing Execute from TRUE to FALSE does not influence the instruction execution during
execution of the instruction.
2. Changing Execute from FALSE to TRUE again does not influence the instruction execution during
execution of the instruction. The instruction will keep going in the previous way.
3. Refer to Section 10.3 for details on BufferMode.
Output Parameters
InSync
TRUE when the master axis and slave axis move
synchronously based on the cam curve.
BOOL
EndOfProfile TRUE when the cam motion reaches the end point. BOOL
Busy
TRUE when the instruction is being executed.
BOOL
Active
TRUE when the axis is being controlled.
BOOL
CommandAborted
TRUE when the instruction is aborted.
BOOL
TRUE /
Error
TRUE when there is an error in the execution of the
instruction.
BOOL
TRUE /
ErrorID
Contains the error code when an error occurs.
Please refer to the section 12.2.
WORD
Output Update Timing
Timing for changing to TRUE
Timing for changing to FALSE
InSync
When the slave axis and master axis
When the cam relationship between the
slave axis and master axis is
11-150