ASDA-A2 Chapter 6 Control Mode of Operation
Revision February, 2017 6-9
Pulse Command Inhibit Input Function (INHP)
Use DI to select INHP (Refer to P2-10~17 and table 8.1 INHP (45)) before using this function. If
not, this function will be unable to use. When DI (INHP) is ON, the pulse command will be cleared
in position control mode and the motor will stop running. (Only DI 8 supports this function.)
Pulse
command
INHP
ON
OFF
ON
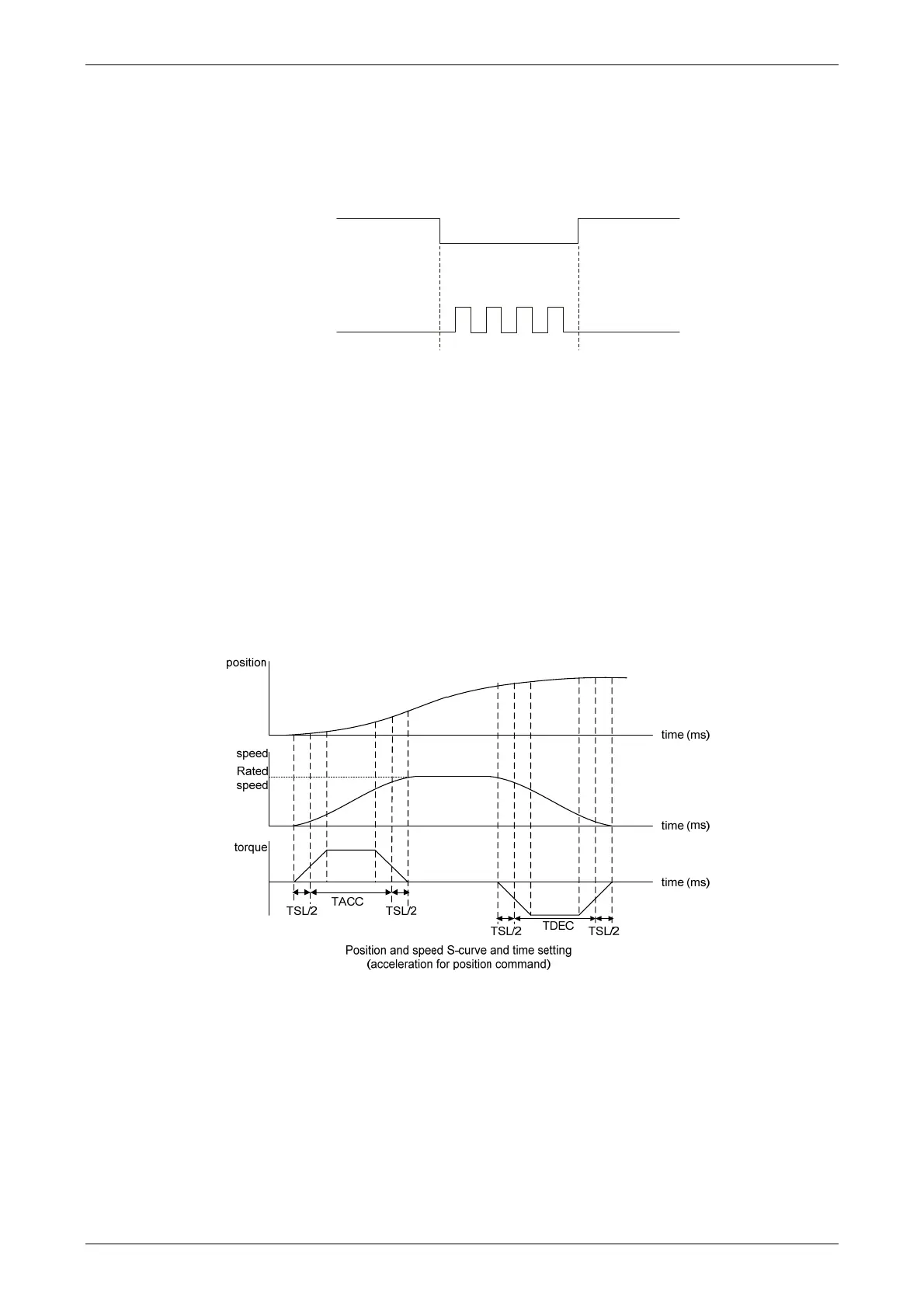
6.2.4 S-curve Filter (Position)
S-curve filter smoothes the motion command. With S-curve filter, the process of acceleration
becomes more continuous and the jerk will be smaller. It not only improves the performance when
motor accelerates / decelerates, but also smoothes the operation of mechanical structure. When
the load inertia increases, the operation of the motor will be influenced by friction and inertia during
the time of activation and stop. However, the situation can be improved by increasing the value of
Acceleration / Deceleration Constant of S-Curve (TSL), Acceleration Constant of S-Curve (TACC)
and Deceleration Constant of S-Curve (TDEC). When the position command source is pulse, its
speed and angular acceleration is continuous, thus, S-curve filter is not a must.
 Loading...
Loading...
