Chapter 7 Motion Control ASDA-A2
Revision February, 2017 7-11
7.3 Description of Motion Axes
The motion axis is an internal counter of the servo drive. It is used for counting the absolute
position of the axis (32-bit integer). The following motion axes are included in this servo drive:
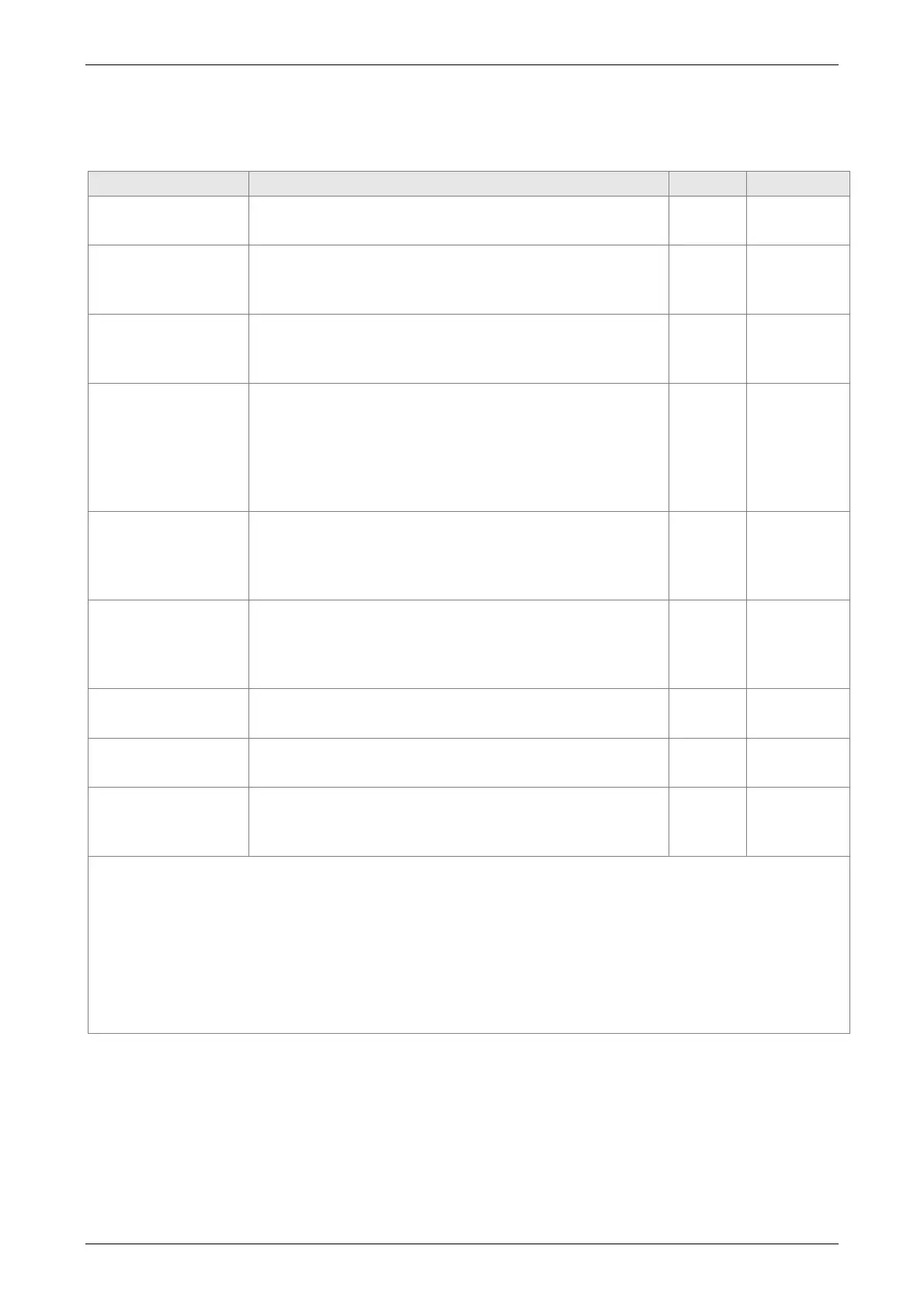
Name of the Axis Description Access Attribute
1. Main Encoder
(P5-16)
It represents the absolute feedback position of the
motor. The unit is PUU (user unit).
R Physical
Axis
2. Auxiliary
Encoder
(P5-17)
It is counted by the pulse signal from CN5 and
usually connects to the second encoder or linear
scale. Its pulse is A/B type.
R/W Physical
Axis
3. Pulse
Command
(P5-18)
It is counted by the pulse signal from CN1 and
usually connects to the pulse command of the
controller. The pulse type could be set by P1-00.
R/W Physical
Axis
4. Capture Axis
(P5-37)
It is the axis which has CAP function. Its command
source could be the above mentioned axis 1~3,
which can write the new value into it and has an
offset from the physical axis. Moreover, after
capturing the first point, the axis position can be
redefined.
R/W Functional
Axis
5. Compare Axis
(P5-57)
It is the axis which has CMP function. Its command
source could be the above mentioned axis 1~4,
which can write the new value into it and has an
offset from the physical axis.
R/W Functional
Axis
6. Master Axis
(P5-86)
It is the master axis of E-Cam. Its command source
could be the above mentioned axis 2, 3, 4 and 7,
which can write the new value into it and has an
offset from the physical axis.
R/W Functional
Axis
7. Command Axis
in PR Mode
The command position is from the path generator in
PR mode.
R Virtual Axis
8. Internal Time
Axis
It is the internal accumulative time counter of the
servo drive. The value increases 1 every 1ms.
R Virtual Axis
9. Synchronous
Capture Axis
(P5-77)
It is similar to Capture Axis (P5-37); however, it
automatically adjusts the incremental pulse between
two CAPs to the setting value of P5-78.
R/W Virtual Axis
Note: Physical Axis: The position value is counted from the actual hardware signal.
Functional Axis: It is the virtual axis which has been processed by the physical. The value
might not be the same as the source of physical axis. However, the
incremental value is the same as the one in physical axis.
Virtual Axis: The axis position comes from the internal firmware of the servo drive. The
command axis of PR mode is not instantaneous; therefore, it cannot be the
command source axis of CAP and CMP function. However, it could be the
command source of master axis of E-Cam.
 Loading...
Loading...
