Chapter 7 Motion Control ASDA-A2
Revision February, 2017 7-19
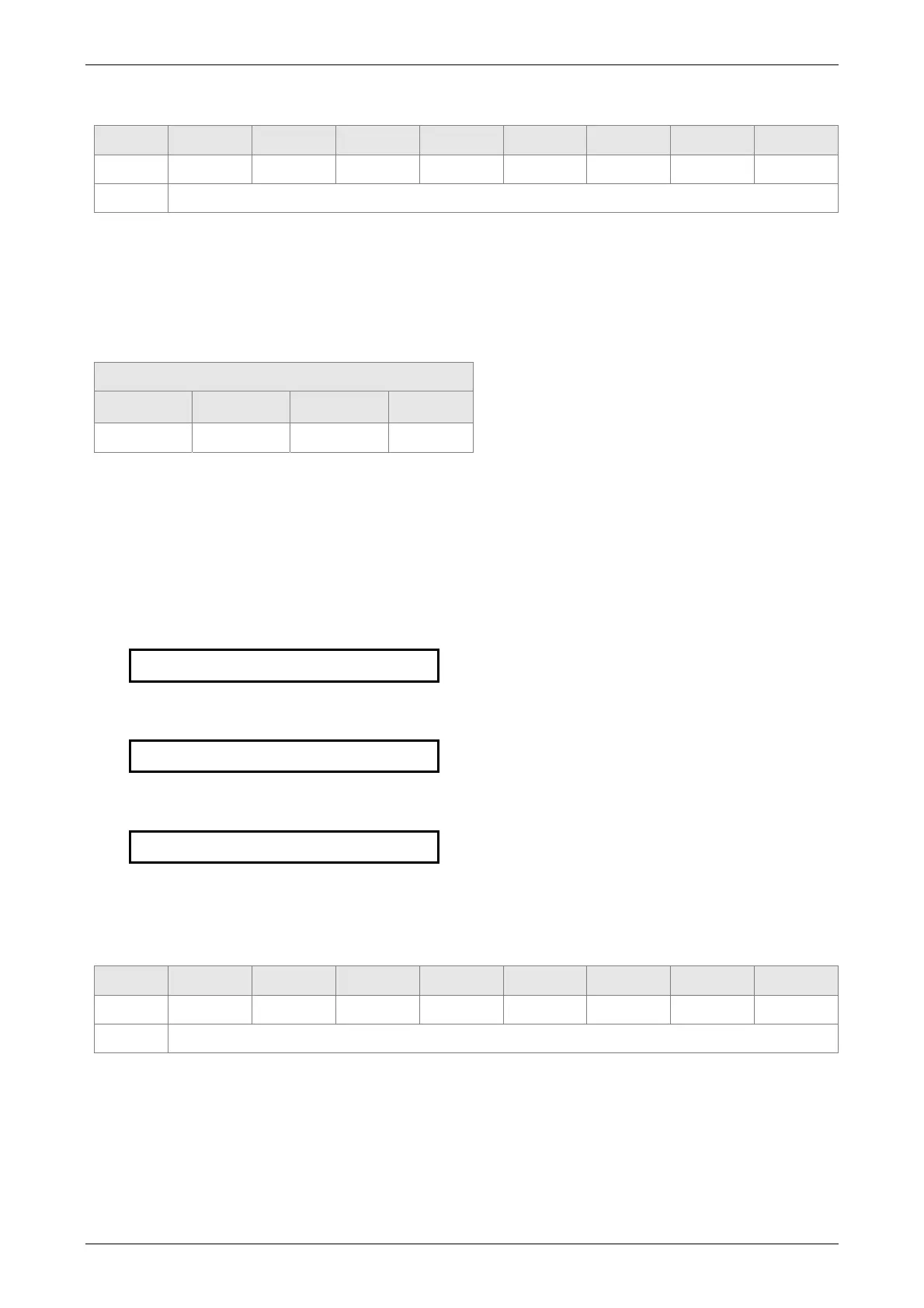
6) SPEED, Constant speed control: TYPE = 1
Bit 31 ~ 28 27 ~ 24 23 ~ 20 19 ~ 16 15 ~ 12 11 ~ 8 7 ~ 4 3 ~ 0
DW0 - - DLY - DEC ACC OPT 1
DW1 DATA (32 bit): Target speed. Unit: Defined by OPT.UNIT
When this command is executing, the motor accelerates or decelerates from the current speed
until it reaches the target speed. After the command is completed, the motor will remain at the
same speed and never stop.
OPT:
OPT
Bit 7 Bit 6 Bit 5 Bit 4
- UNIT AUTO INS
※DI.STP stop and software limit are acceptable.
INS: When this PR is executing, it will interrupt the previous PR.
AUTO: When the speed reaches the constant speed area, the next PR will be loaded
automatically.
UNIT: 0 unit is 0.1r/min (
s/m10
6
for linear motor); 1 unit is PPS (Pulse Per Second)
ACC / DEC: 0 ~ F, Accel / Decel number
ACC (4-bit) / DEC (4-bit)
Index P5-20 ~ P5-35
SPD: 0 ~ F, target speed number
SPD (4-bit)
Index P5-60 ~ P5-75
DLY: 0 ~ F, delay time number. The delay after executing this PR. The external INS is invalid.
DLY (4-bit)
Index P5-40 ~ P5-55
7) POSITION, Positioning control: (TYPE = 2, PR is completed and stopped), (TYPE = 3, the next
PR is executed automatically after the PR is completed)
Bit
31 ~ 28 27 ~ 24 23 ~ 20 19 ~ 16 15 ~ 12 11 ~ 8 7 ~ 4 3 ~ 0
DW0 - - DLY SPD DEC ACC OPT 2 or 3
DW1 DATA (32 bit): Target position, Unit: Pulse of User Unit
 Loading...
Loading...
