SuperSigma2 AM PMS – V1.5.6 17-1-2020 Page 71 (97) ©2019 DMC GmbH Herten Germany
M5-3 Enable double PI settings for speed controller “SpdPIx2”
This setting enables a dual set of gains for speed controller.
• If set to 0 only one set of speed controller gains is adopted (“M5-1 Proportional gain speed controller “Kp Spd””,
“M5-2 Integral gain speed controller “Ki Spd””).
• If set to 1 two sets of speed controller gains are adopted. If the actual speed is below “M5-4 Double PI speed
threshold “SpdPITH”” the low speed gains are adopted (“M5-5 Proportional gain speed controller below
threshold “KpSpdLow”” and “M5-6 Integral gain speed controller below threshold “KiSpdLow””). If the actual
speed is higher than “M5-4 Double PI speed threshold “SpdPITH”” the following speed gains are adopted (M5-1
Proportional gain speed controller “Kp Spd”, “M5-2 Integral gain speed controller “Ki Spd””).
M5-4 Double PI speed threshold “SpdPITH”
This parameter sets the speed threshold for speed control to move from low speed PI gains to high speed PI gains.
M5-5 Proportional gain speed controller below threshold “KpSpdLow”
This parameter has the same meaning of “M5-1 Proportional gain speed controller “Kp Spd””. This is applied if “M5-3
Enable double PI settings for speed controller “SpdPIx2”” is set to 1 and actual speed is above “M5-4 Double PI speed
threshold “SpdPITH””.
M5-6 Integral gain speed controller below threshold “KiSpdLow”
This parameter has the same meaning of “M5-2 Integral gain speed controller “Ki Spd””. This is applied if “M5-3 Enable
double PI settings for speed controller “SpdPIx2”” is set to 1 and actual speed is above “M5-4 Double PI speed threshold
“SpdPITH””.
M5-7 Transition time between the two PI settings for the speed controller “TransTim”
This parameter sets the time is needed for moving from low-speed gains to high-speed gains and vice versa. A too small
value can produce a bumpy transition.
Parameters for “smooth speed limiting” function
A second speed limiting function is available..
The new speed limiting feature is active in both speed and torque mode with different effects, with the goal to keep the
drive feeling of the vehicle more comfortable and avoid bumps caused by rough ground conditions.
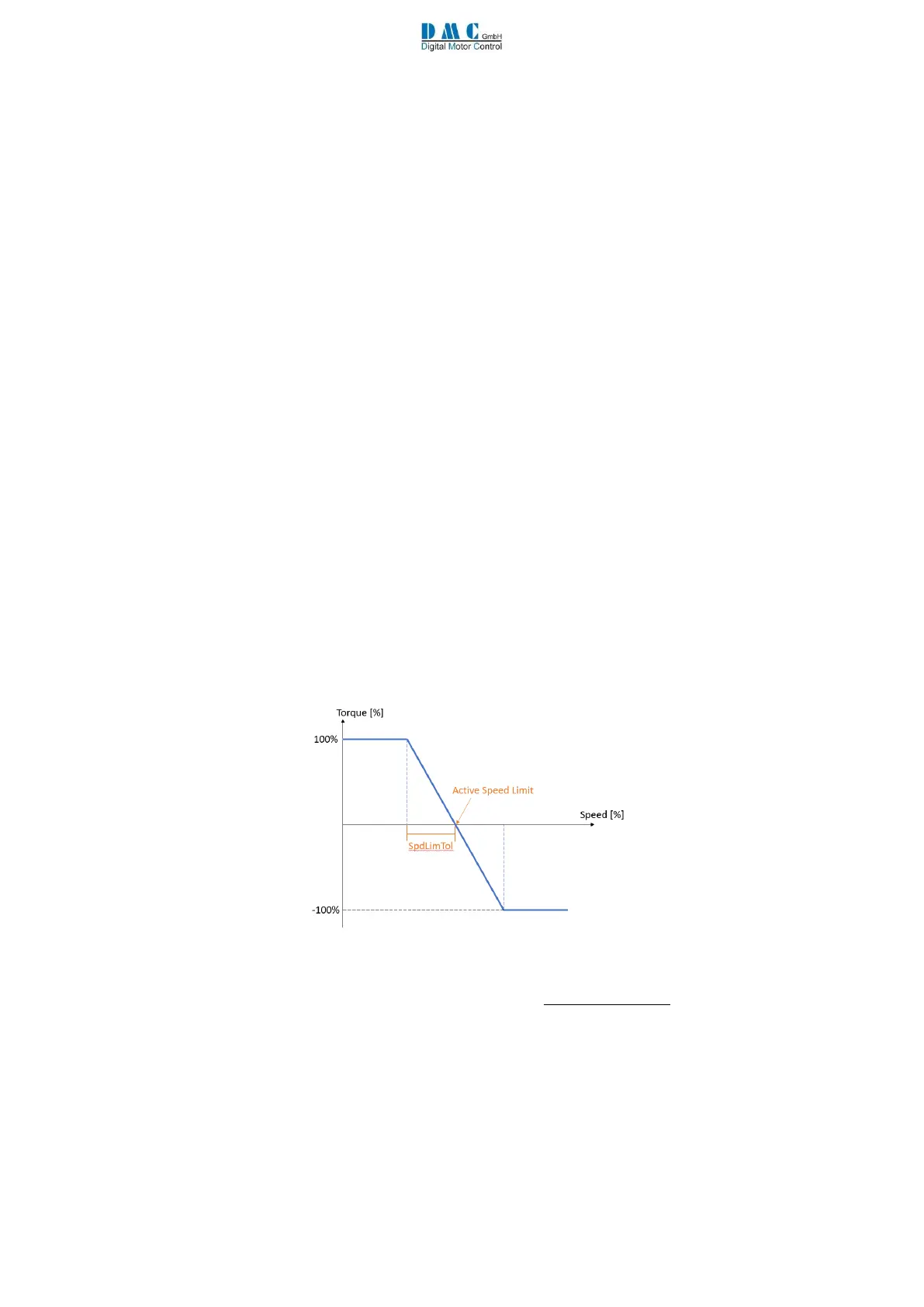
M5-8 Speed limit tolerance “SpLimTol”
This parameter is active in both speed and torque mode for traction control. It is not active for pump control.
It sets the error tolerance in % around a speed limitation. It is defined as:
, thus setting this parameter
to 0 would deactivate the function.
Example: if “SpLimTol” is set to 10% and the active speed limit is 100 Hz, the speed will be allowed to vary in range of 90-
110 Hz.
To have a smooth speed limitation without overshoot it is suggested to set this parameter between 5% and 15%. Too
large values will allow a very smooth action but the speed variation around the limit may be very large. Too small values
will give a tighter speed limitation but it may result more aggressive and bumpy.
In speed mode this function allows to avoid continuous adjustment of current while driving on flat ground with vehicle
unloaded, thus reducing the heating up of motor and controller.