88 EZMotion User/Programming Guide
www.controltechniques.com Revision: A8
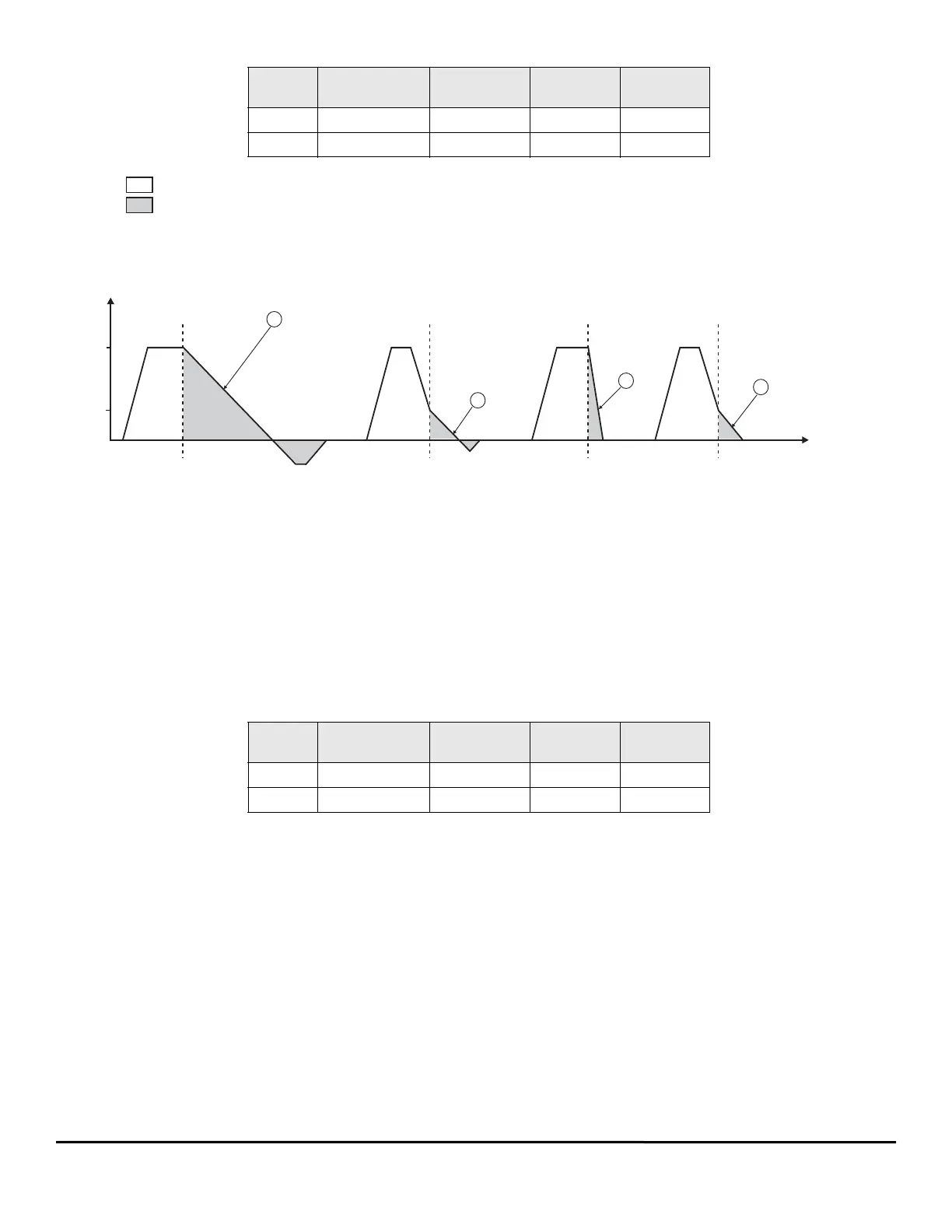
Figure 88: Ramps Examples of a Fast Index to a Slower Index
1. Index.1.Accel specified by user is used to decelerate from Index.0.Vel, to Index.1.Vel, but overshoots since ramp is
not aggressive enough to reach Index.1.Vel within Index.1.Dist of 3 Revs.
2. Index.1 begins at Index.1.Vel but since Index.1.Decel specified by user is not aggressive enough to decelerate to zero
velocity within Index.1.Dist of 3 Revs slight overshoot occurs.
3. Index.1 begins at Index.0.Vel and ramp is automatically calculated to reach zero speed within Index.1.Dist of 3 Revs
without any overshoot. If Index.1.Accel and or Decel were aggressive enough to reach zero speed within 3 Revs, they
would have been used instead of automatically calculating the ramp.
4. Index.1 begins at Index.1.Vel and ramps is automatically calculated to reach zero speed within Index.1.Dist of 3 Revs
without any overshoot. If Index.1.Decel was aggressive enough to reach zero speed within 3 Revs, it would have been
used instead of automatically calculating the ramp.
Distance
(Revs)
Velocity
(RPM)
Accel
(RPM/sec)
Decel
(RPM/sec)
Index 0 20 1250 2000 3000
Index 1 3 500 500 500
Blended Index
User Ramps
Compound Index
Auto Ramps
Blended Index
Auto Ramps
Compound Index
User Ramps
V
t
= Index 0
= Index 1
1
2
3
4
1250
500
Distance
(Revs)
Velocity
(RPM)
Accel
(RPM/sec)
Decel
(RPM/sec)
Index 0 5 500 1000 1000
Index 1 20 1250 2000 2000