Safety
Information
Introduction Installation
PowerTools
Pro Software
Communications
How
Motion
Works
How I/O
Works
Configuring
an
Application
Programming
Starting and
Stopping
Motion
Starting and
Stopping
Programs
Parameter
Descriptions
Drive
Parameters
Used by
EZMotion
Diagnostics Glossary Index
EZMotion User/Programming Guide 79
Revision A8 www.controltechniques.com
smoothness, but also increases lag. See Filter table below to select proper setting.
Enable Feedforward
The Enable Feedforward check box is used to turn on or turn off feedforward. When the check box is selected, feedforward is
active. If the check box is clear, feedforward is not used.
Master Velocity Units
Decimal Places
The number of decimal places defined in this parameter determines the max resolution of all synchronized time base velocity
parameters found throughout the PowerTools Pro software. Set between 0 and 6 decimal places. Higher number of decimal
places allows higher velocity resolution, but can limit the max speed allowed by the application.
Master Acceleration Units
Decimal Placed
The number of decimal places defined in this parameter determines the max resolution of all synchronized time base
acceleration and deceleration parameters found throughout the software. Set between 0 and 6 decimal places.
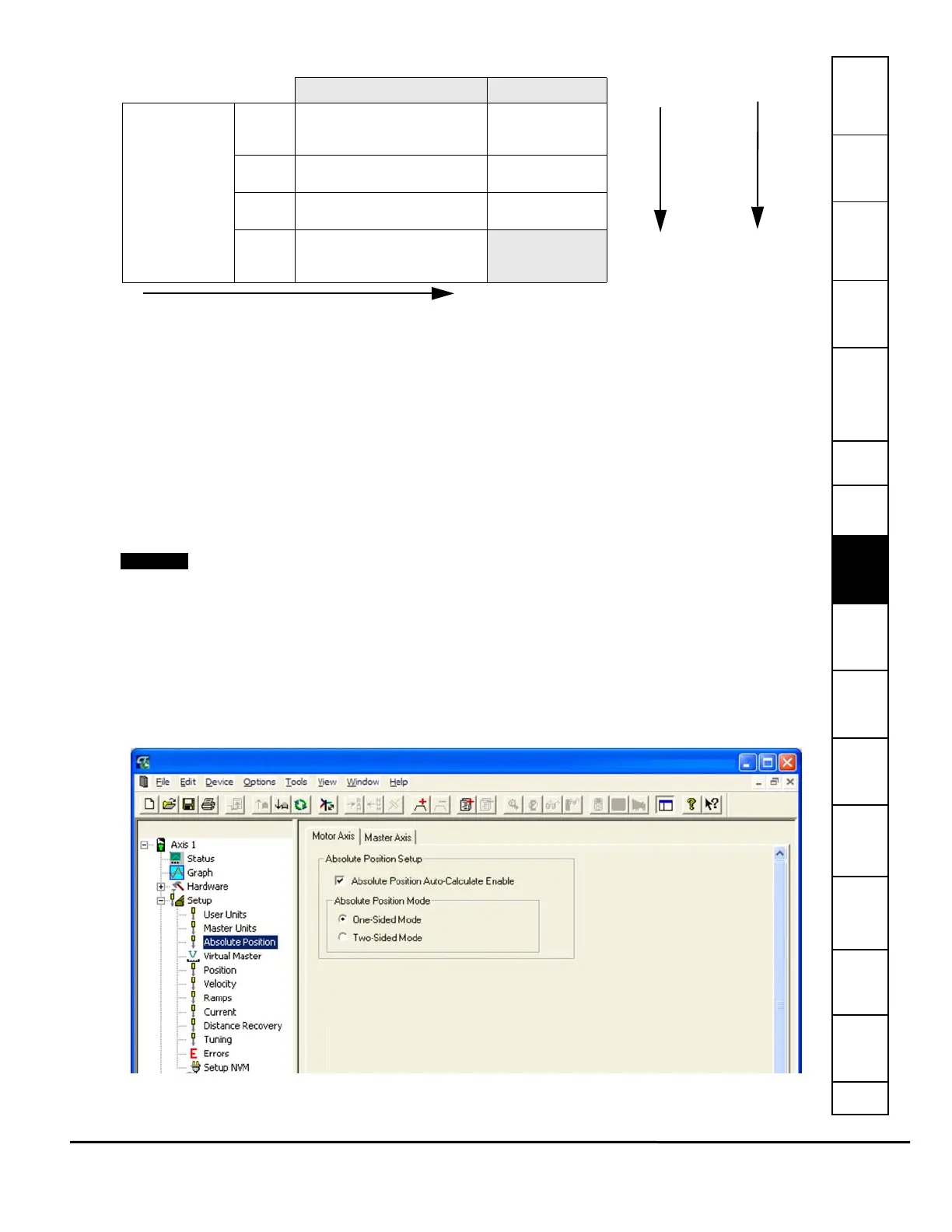
8.4.4 Absolute Position View
NOTE
If not using an absolute encoder type in your application, this view can be skipped altogether.
The primary reason for using an absolute encoder is that position is not lost when power to the machine is cycled. The
absolute encoder does not require that you maintain logic power, nor do most absolute encoders require any type of battery
power backup. Therefore, on power-up, the motor encoder can provide its position feedback to the motion controller without
the need to "re-home" the machine to a sensor or encoder marker pulse. Since the machine does not need to be re-homed,
the customer saves time and in many cases reduces product waste.
This view is used to define how the position feedback from the absolute encoder is to be interpreted by the EZMotion on
power-up or after a warm-start.
Figure 83: Absolute Position View
Feedforward OFF Feedforward ON
# of Samples
Disabled
One update of phase shift
(not velocity dependent)
No Filtering
No delay,
No Filtering
4
Small Lag (function of speed),
Low Filtering
Poor at low speed,
Low Filtering
8
Medium Lag (function of speed),
Medium Filtering
Good at low speed,
Medium Filtering
16
Large Lag (function of speed),
High Filtering
Best at low speeds,
High Filtering
Smoother
Increasing
Lag with FF
Off
Reduced Lag