BCSD-52/116 Digital Brushless AC Servo Drive system - Ref. 1809
• When Position Control is configured at the Host.
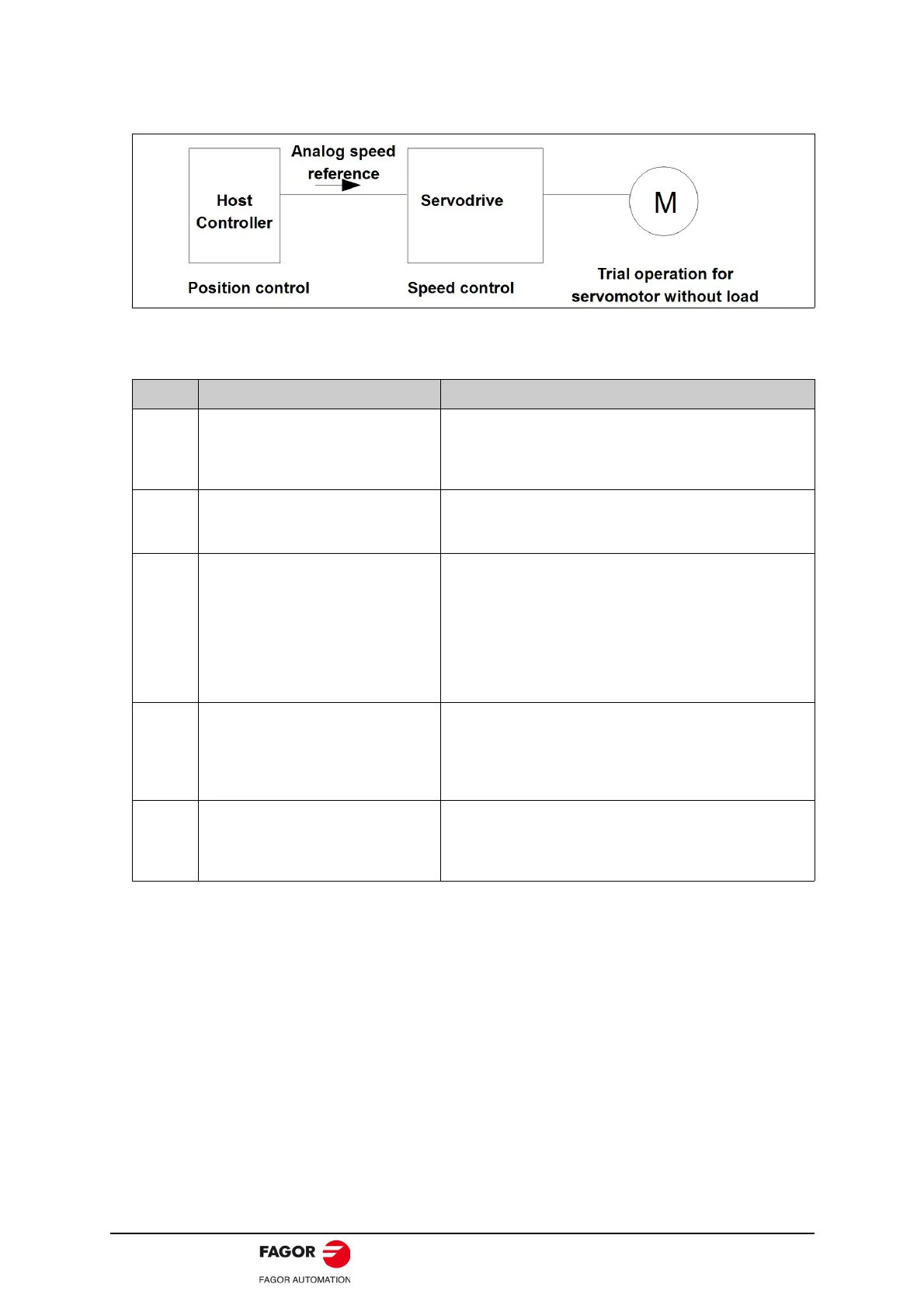
When the servodrive conducts speed control and position control is conducted at the host controller,
perform the operation below, following the operation in Operation Procedure in Speed Control Mode
(Pn005=H.0).
Step Description Check Method and Remarks
9
Check the input signal circuit again,
and check that the speed reference
input (between the V-REF+ and V-
REF-) is 0 V.
Refer to the above figure for input signal circuit.
10
Turn the servo ON input signal (/S-ON)
ON.
If the servomotor rotates at extremely slow speed, refer to
4.4.3 Adjusting Reference Offset, and use the reference
voltage offset to keep the servomotor from moving.
11
Send the command for the number of
servomotor rotation easy to check (for
example, one servomotor revolution)
from the host controller in advance,
and check the sent number of rotation
and actual number of rotation by visual
inspection and the Un004(rotation
angle) [pulse]
Refer to 5.1.6 Operation in Monitor Mode for how it is
displayed.
Un 004 (rotation angle) [pulse]: The number of pulses from
the zero point.
12
If the sent number of rotation and
actual number of rotation in step 11 are
not equal, correctly set the Pn200 (PG
divided ratio) outputting the encoder
pulse from the servodrive.
Refer to 4.4.7 Encoder Signal Output for how to set PG
divided ratio (Pn200[P/Rev]): The number of encoder pulses
per revolution.
13
When the speed reference input is set
to 0 V and servo OFF status enters, the
trial operation for position control with
the host controller is completed.
—
 Loading...
Loading...
