Festo — EMCS-ST — 2021-03b
4. Select the reference end position "Ref" from the IO-Link device data (0x0103.0, reference)
and start the referencing movement with end position detection (0x0104.0, Execute "Reference"
Movement) (only required if the reference end position Ref" is different from the factory setting
or if the useful range has been changed). The drive system is referenced after successful homing
è
15.2.2 Device data.
Homing sets the "Pos
Imp
" intermediate position and the "Pos
Start Press
" start press position equal
to the determined useful range.
5.
Parameterise operating modes via IO-Link interface:
Basic parameters for point-to-point operation with and without press function or manual opera-
tion (demo)
–
0x0100.0 velocity "Speed In"
– 0x0101.0 velocity "Speed Out"
–
0x0106.0, end position "Out" "Lim
Out
" (reference point reference end position "Ref")
–
0x0108.0, intermediate position "Pos
Imp
" (reference end position "Ref")(from firmware version
v19.0.4.107_release)
additional parameters for point-to-point operation with press function
–
0x0102.0 "Force"
– 0x0105.0 Start Press "Pos
Start Press
" position (reference point end position "Ref")
Then the EMCS-ST is ready for operation and the application can be controlled via the IO-Link interface
"process data 0x0029.1, 0x0029.2 and 0x0029.5" or "system parameter 0x0002"
è
15.2.5 Control
point-to-point operation via IO-Link.
10
Drive system
10.1 Dimensions and units
10.1.1
Basic and user units
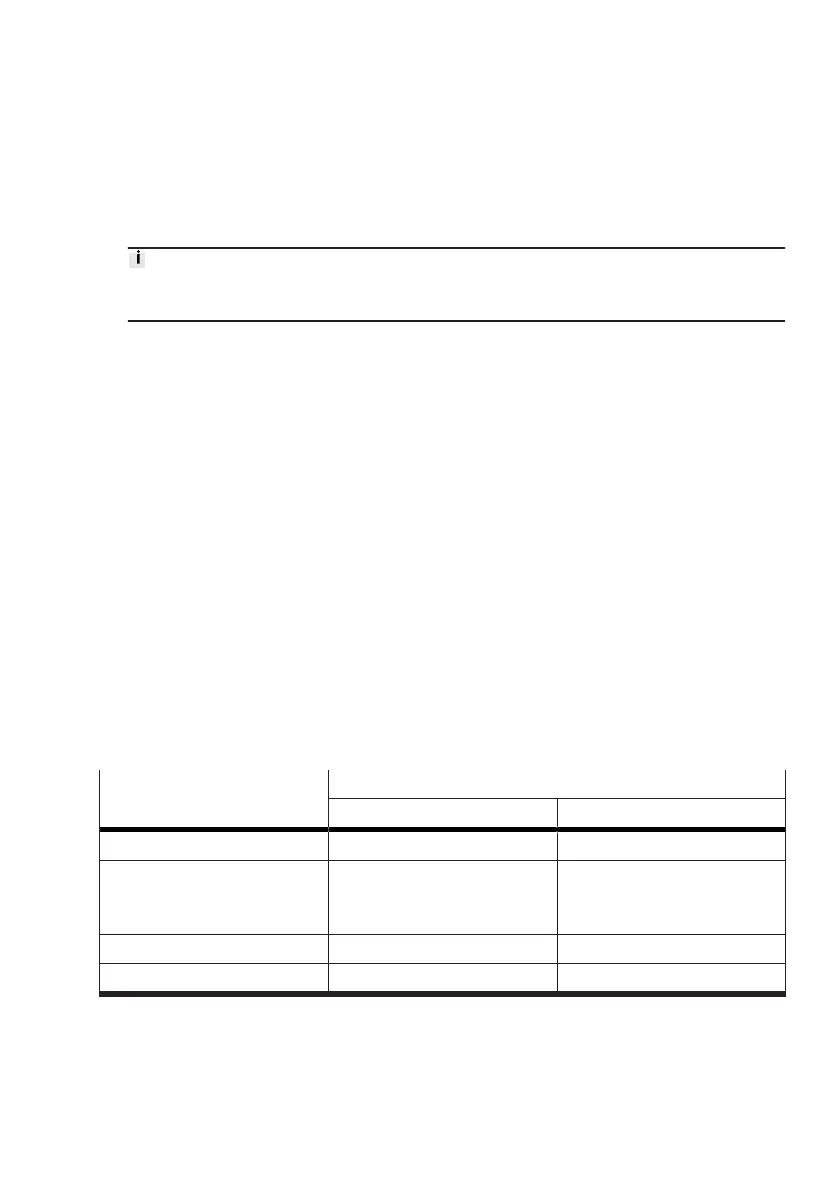
The following quantities and units can be read or written via the IO-Link parameters.
Size Unit
linear drive system rotary drive system
Length [mm]/[km]
−
Bracket
−
[°] as position
[number of revolutions] as
mileage
Velocity [mm/s] [rpm]
Force
1)
[N]
−