Flexball Italiana S.r.l. 36
► Important 4: dual command station (command station for two motors) is configured from the factory to be
mounted in systems with only one actuator. This is the typical application where there are motors and/or
gearboxes with electronic interface (like it is described in sections 7.4 and 7.5). In case of systems with two
propulsion systems equipped with mechanical motors and mechanical gearboxes, you need to use two
mechanical actuators (installations described at sections 7.1, 7.2 and 7.3). If this is the case, the command
station must be re-configured as described at section 4.2.
8.2. Configuration of the actuator
To configure the actuator it is necessary to:
enable or disable the end of line resistance
define the CANBus address
These operations must be according to the position of the actuator as described in the schemes of chapter 7.
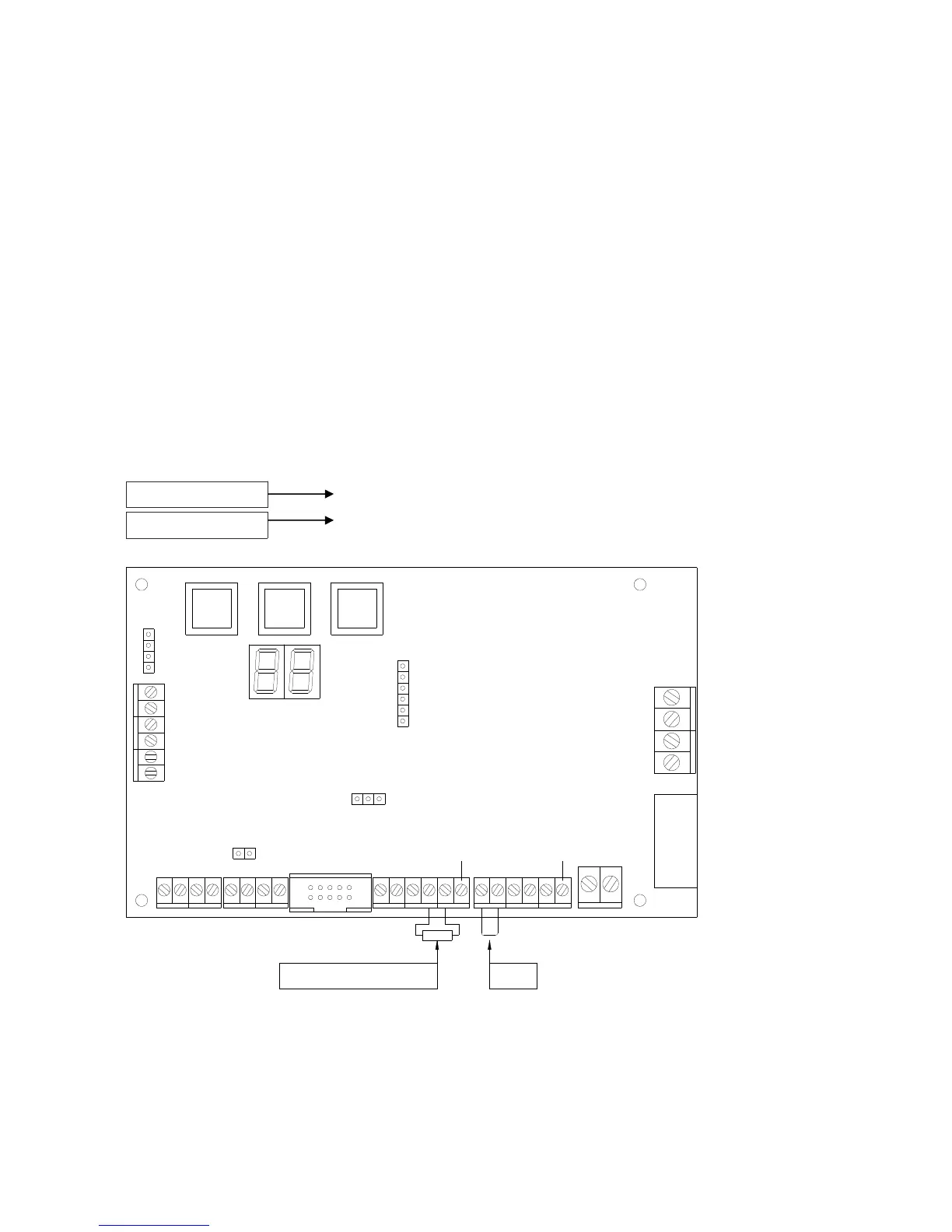
Actuator PCBoard version 2.0
JP19: YES (end-line)
JP14: YES (address)
JP3
JP13
JP2
1
Fusibile
Fuse
7
JP5JP9JP10
JP8
JP11
JP4
JP7
Resistenza di fine linea (120 O)
End-line resistance (120 O)
Indirizzo
Address
circuiting terminals 5 and 6 of JP3
Enable the 120
short-circuiting either terminals 8 and 9 of JP5 or
terminals 2 and 3 of JP3
 Loading...
Loading...