D2 Drive User Guide v1.8 5. Drive Configuration
HIWIN Mikrosystem Corp. 127
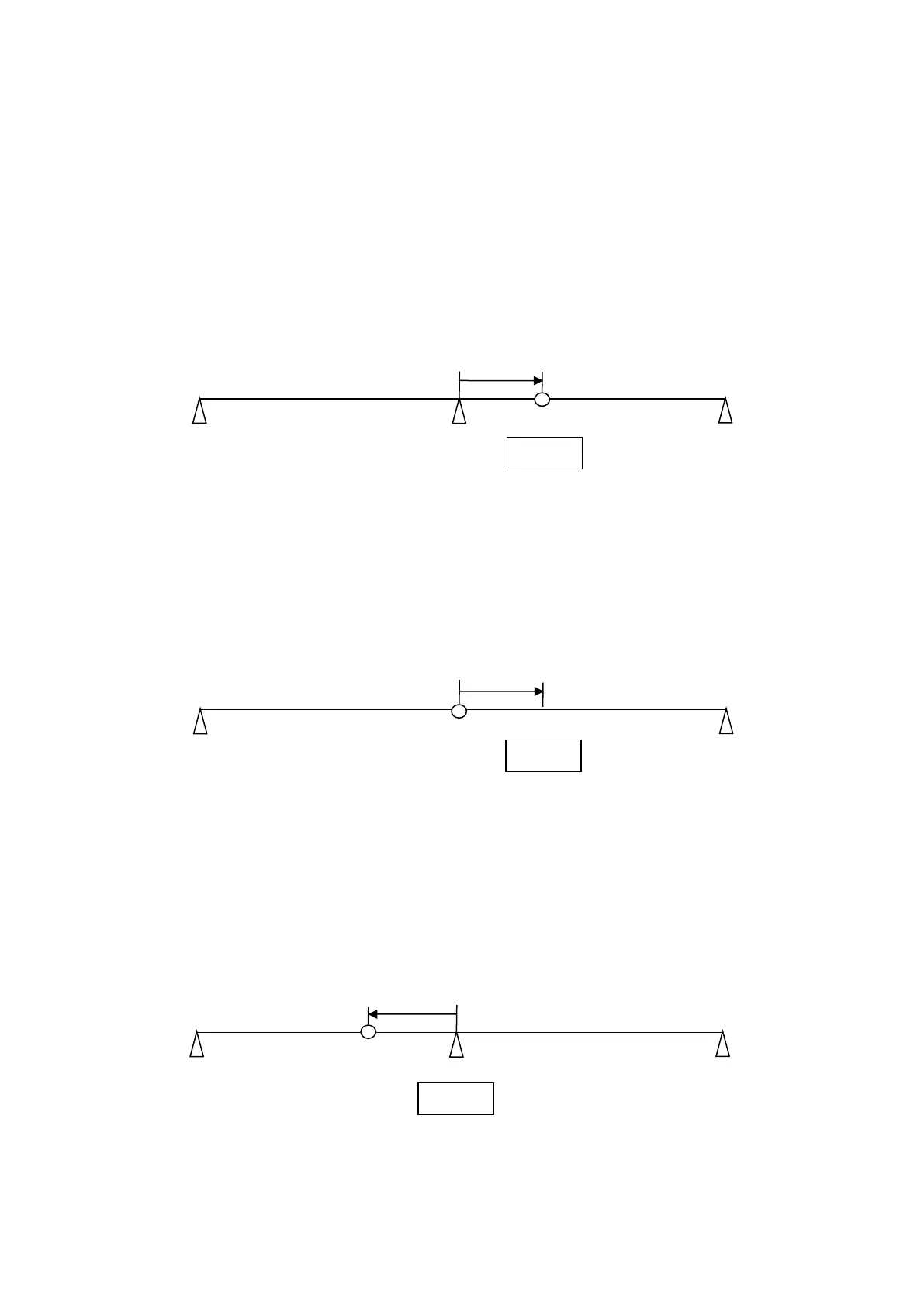
Home offset
(1) Homing mode for incremental encoder
This method is only applicable to homing modes (1) and (2) described above. When
“Home Offset” is set to a nonzero value, the home position found in the original condition
is offset by a distance. This new position is taken as the coordinate origin, and the motor
moves to this origin position. For example, if the left and right conditions are not “None”,
the drive will take the position, which is the home position found in the original condition
offset by a distance, as the new home position, as shown in Fig. 5-48. If “Home Offset” is
positive, the coordinated origin is at the right side of home position found in the original
condition; while if it is negative, the coordinated origin is at the left side of home position
found in the original condition.
Fig. 5-48
(2) Homing mode for absolute encode
This method is only applicable to the homing mode (3) described above. When “Home
Offset” is set to a nonzero value, the drive sets the current position to the value of “Home
Offset”, and the motor does not move, as shown in Fig. 5-49. If “Home Offset” is positive,
the coordinated origin is at the left side of current motor position; while if it is negative, the
coordinated origin is at the right side of current motor position.
Fig. 5-49
(3) CiA 402 homing mode
This method is only applicable to the homing mode (4) described above. When “Home
Offset” is set to a nonzero value, the drive sets the home position found in the original
condition to the value of “Home Offset”, as shown in Fig. 5-50. If “Home Offset” is positive,
the coordinated origin is at the left side of home position found in the original condition;
while if it is negative, the coordinated origin is at the right side of home position found in
the original condition.
Fig. 5-50
Home position found in
the original condition
Home position found in
the original condition