D2 Drive User Guide v1.8 5. Drive Configuration
HIWIN Mikrosystem Corp. 131
Table 5-15
Initial
movement
direction
Search first in the left direction.
Search first in the right direction.
Search at the lower homing speed. Set it in
the “Slower Speed” field given in Fig. 5-47.
Search at the faster homing speed. Set it in
the “Faster Speed” field given in Fig. 5-47.
Searching
home
position
method
Search the encode index signal only.
Search the near home sensor only.
Near Home Sensor then
change to lower speed,
move left, search index
After the near home sensor is found, change
to search the encoder index signal at the
lower homing speed in the left direction.
Near Home Sensor then
change to lower speed,
move right, search index
After the near home sensor is found, change
to search the encoder index signal at a
lower homing speed in the right direction.
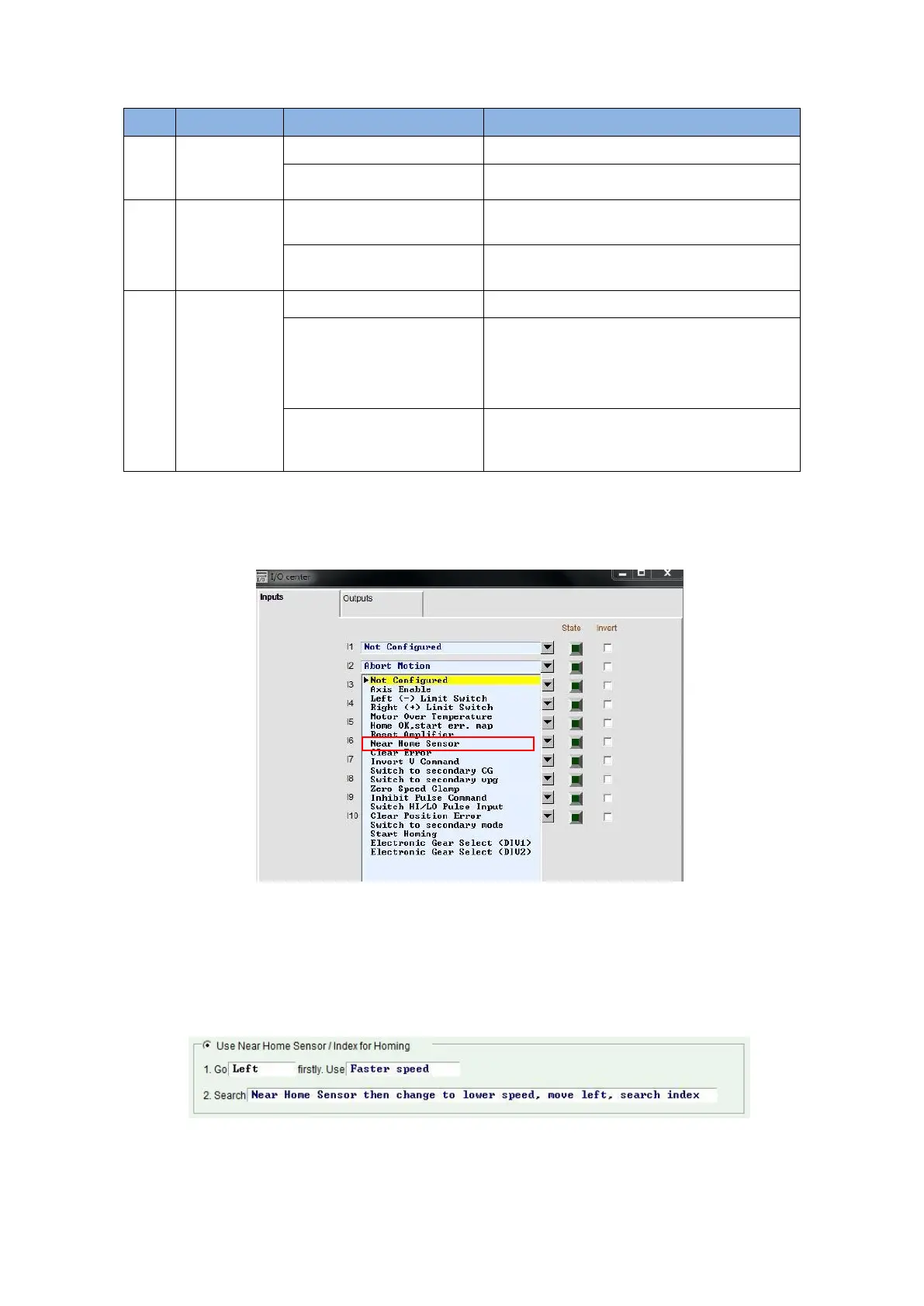
When “Near Home Sensor” is used for homing, the photoelectric switch or mechanical switch
can be connected to the digital input of drive. Taking I2 as an example, set I2 to be “Near
Home Sensor” in the I/O center, as shown in Fig. 5-57.
Fig. 5-57
Homing example:
According to the setting of Fig. 5-58, when starting the homing procedure, the motor moves at
the faster homing speed in the negative direction to search “Near Home sensor”. After it is
found, the motor searches the first index signal at the slower homing speed in the negative
direction. The action process is described in Fig. 5-59
Fig. 5-58