D2 Drive User Guide v1.8 6. Drive Tuning
HIWIN Mikrosystem Corp. 151
The performance center has the function of measuring the settling time. The target radius of
position error and debounce time for settling time can be set via “Target radius”, referring to
Section 5.6. In-position signal setting. During motion, the servo gain (“Primary CG”) can be
tuned to meet the requirement of settling time. The higher the servo gain is, the faster the
response is and the shorter the settling time is. The required time from moving to in-position
can be observed via “Move time”, “Settling time”, and “Total time” (refer to Section 3.7). Click
“Set scope…” button to appear the graphical oscilloscope (“Scope”). This tool can be used to
observe the motion waveform related to the settling time.
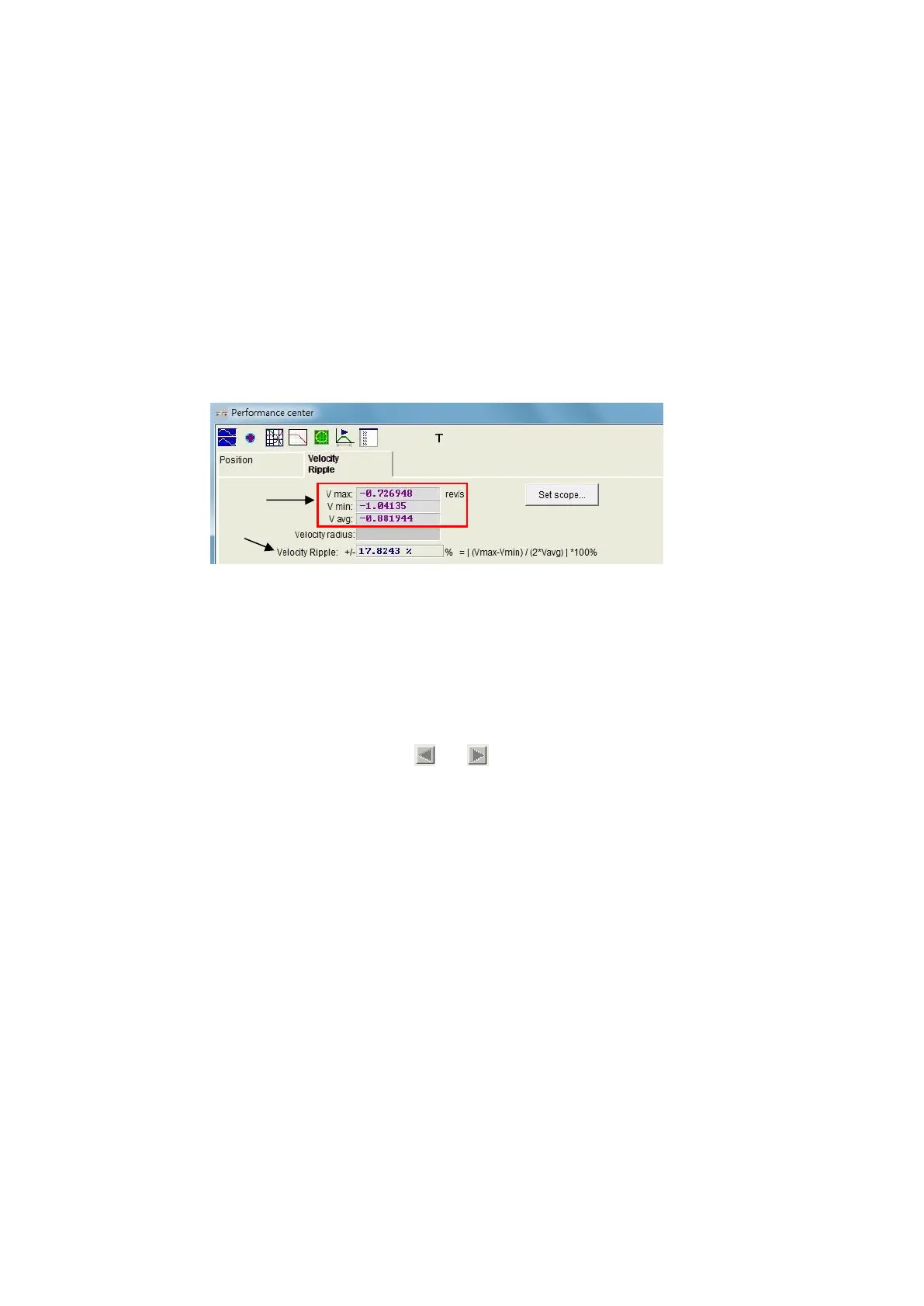
The performance center has the function of measuring the velocity ripple. The performance of
velocity ripple can be observed via the point-to-point motion. Here, “V max”, “V min”, “V avg”,
and “Velocity Ripple” are the maximum speed, minimum speed, average speed, and velocity
ripple at the constant speed phase, respectively. Click the “Set scope…” button to appear the
graphical oscilloscope (“Scope”). This tool can be used to observe the motion waveform
related to the velocity ripple.
Fig. 6-5 Performance center – “Velocity Ripple” tab
○
1
V max: The maximum of velocity ripple.
V min: The minimum of velocity ripple.
V avg: The average of velocity ripple.
○
2
Velocity Ripple: Velocity ripple.
In addition to the P2P function, the relative motion (“Relative move”) can be set to move a
distance; while the continuous motion (“Jog”) can continue moving in the positive or negative
direction just by clicking the button of or . The speed, acceleration/deceleration, and
smooth factor in the “Motion Protection” area are also used as the function of motion
protection. Hence, if these values are forgot to set to the value of motion protection after the
test run is completed, the expected speed or acceleration may not be reached at receiving the
motion command sent from the host controller. Please pay special attention to this.