D2 Drive User Guide v1.8 6. Drive Tuning
HIWIN Mikrosystem Corp. 152
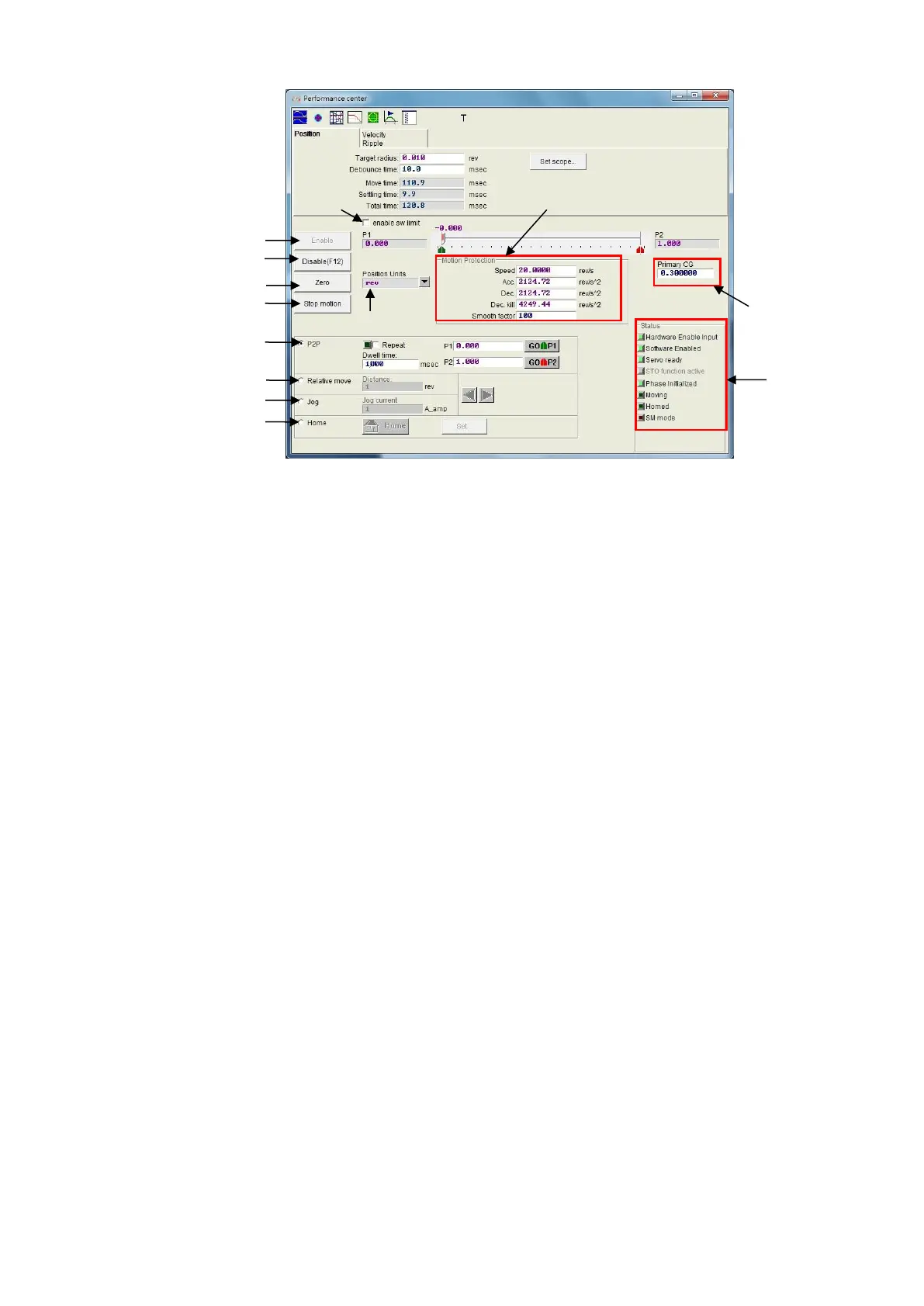
Fig. 6-6 Performance center – “Position” tab
○3 Enable: Enable the motor.
○4 Disable: Disable the motor.
○5 Zero: Set the current position to the zero position.
○6 Stop motion: Stop the motor.
○7 Position Units: Unit setting. Set the preferred unit at the operation. This is the same as the
unit setting in “Quick View” on the main window.
○8 Motion Protection: Protection parameters for the motor motion, including the speed,
acceleration, deceleration, emergency stop deceleration, and smooth factor at the test
run. Users can use the smooth factor to plan the path trajectory as an S-type curve or
T-type curve. The adjustment range is 1 - 500. The larger the value is, the closer to the
S-type curve is; while the smaller the values is, the closer to the T-type curve is. Refer
to Section 3.4 for more information.
○9 P2P: Execute the point-to-point motion.
○10 Relative move: Execute the relative motion.
○11 Jog: Execute the continuous movement. Set the current value for the continuous
movement with the constant current.
○12 Home: Execute the homing procedure.
○13 Common Gain: Servo gain. The greater the gain is, the greater the servo rigidity is. Users
can user this parameter to adjust the servo rigidity. But if the servo stiffness is too
strong, it will lead to system instability, and cause the vibration and electrical noise. At
this time, this value should be reduced.
○14 Status Display: Display the status.
○15 enable sw limit: Start the software limit protection, which restricts the travel of motor.
4
5
3
6
9
10
14
13
8
15