D2 Drive User Guide v1.8 6. Drive Tuning
HIWIN Mikrosystem Corp. 170
If “CG” = 0.5 and “sg_run” = 1.2, this means that the actual servo gain in the “Move”
phase is changed to 0.5 x 1.2 = 0.6.
The “Settling” and “In-position” phases use the same setting method to change the
originally fixed servo gain to the gain met the different requirement in each motion phase
via “Schedule gains”.
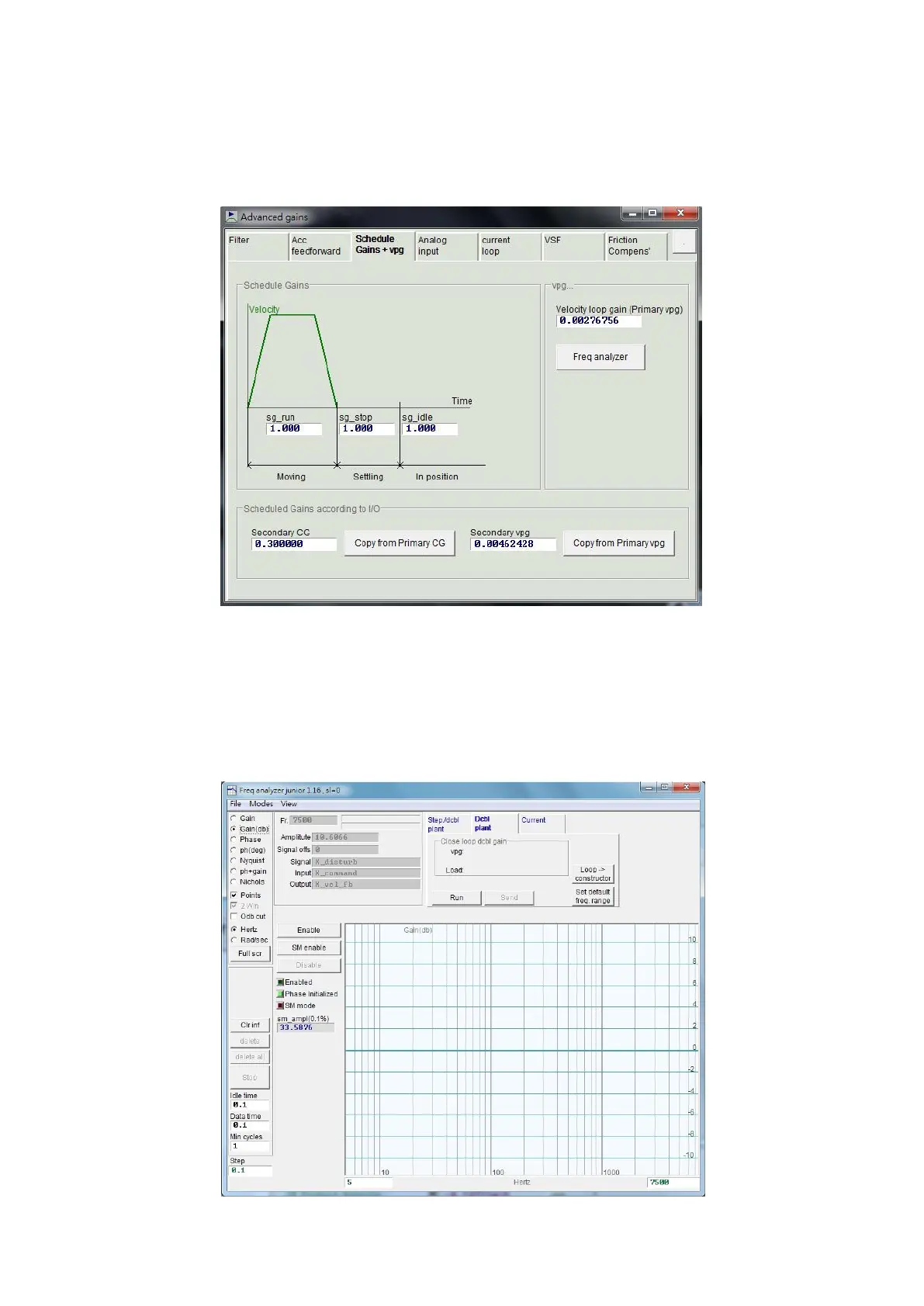
Fig. 6-31 Schedule gains
(2) Velocity loop gain (vpg)
The velocity loop gain (vpg) is an internal control parameter of D2 drive. Normally, the
initial value is calculated by parameters set in the configuration center. This value is not to
be modified under the normal case. However, it can be re-adjusted by using “Freq
analyzer”.
Step 1. Click the “Freq analyzer” button to appear the window of Fig. 6-32.
Fig. 6-32