Chapter 3 Operation
POWER CON
PCON-CB/LC
100
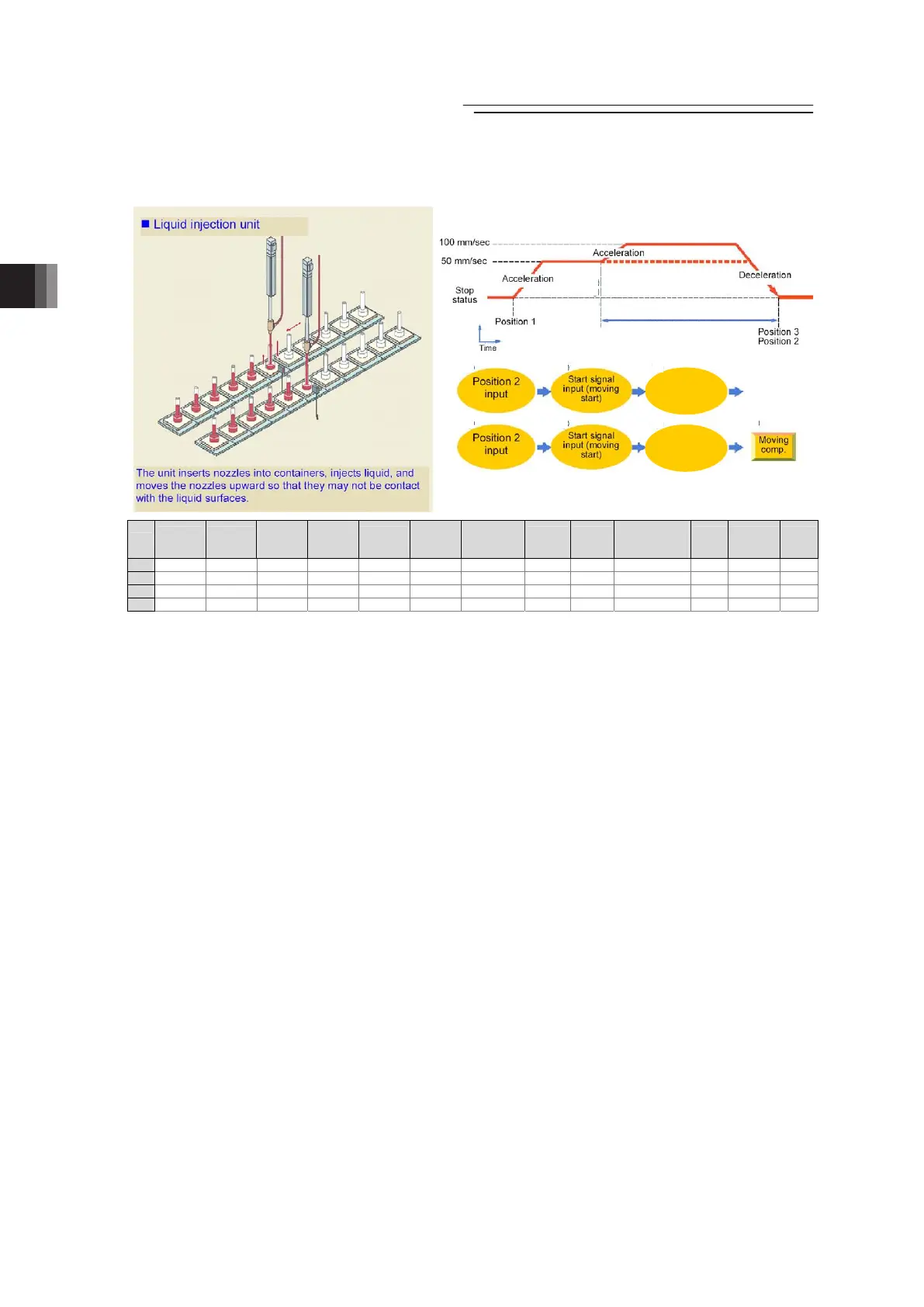
[2] Speed Change During the Movement
Sample use
No.
Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Transported
load
Stop
mode
0
1 150.00 250.00 0.20 0.20 0 0 0.10 0.00 0.00 0 0 0 0
2 0.00 50.00 0.20 0.20 0 0 100.00 0.00 0.00 0 0 0 0
3 0.00 100.00 0.20 0.20 0 0 0.10 0.00 5.00 0 0 0 0
Control method
The speed of the actuator can be changed while it moves. Positions are used by the number of
speeds. The method of controlling the operation to each position is the same as that described
in [1] Positioning.
The example below describes the case of 2 speeds:
1) In this example, the speed is changed while the actuator moves from the position of
150mm to the position of 0mm. At first, set the positioning to the target position at the first
speed in position No.2. In the positioning width, set the distance from the speed change
position to the target position. The value is set to 100mm in the example. Thus, for position
No.2, positioning complete signal PEND is turned ON at the position before the target
position by 100mm.
2) Set the positioning to the target position at the second speed in position No.3.
3) Start position No.2. Then start position No.3 successively when PEND in position No.2 is
turned ON. In normal positioning, position data specified later has always a priority over
position data specified earlier. Thus, the operation in position No.3 is started on the way of
the operation in position No.2.
In this example, the target positions No.2 and 3 are equal with each other. They may not be the
same. However, setting the target positions to be equal with each other allows the distance
from the speed change position to the target position to be known easily.
To increase in the number of speed change steps, add a position number and operation
sequence, set the speed change position in the positioning width and operate the actuator
continuously.
Positioning
Completion
Signal Output
Veloc ity
Positioning
Completion
Signal Output
1) 2) 3)
4) 5) 6) 7)
1) 2) 3)
5)
4)
6) 7)
Positioning complete width at position 2

 Loading...
Loading...







