Chapter 5 Collision Detection Feature
POWER CON
PCON-CB/LC
162
5.2 Settings
Have the following settings established when using following function.
1) Select to use feature
Setting can be established in the parameters. Setting of parameter ” No.168 Collision Detection
Feature”
Setting value Operation status Alarm level
0 Detection not to be conducted -
1 Detection is conducted in position zone setting range.
3
(Note 1)
Detection is conducted in position zone setting range, but
is not conducted in the following conditions. In this setting,
it can avoid a mistake to detect the current during
acceleration.
• The first movement after releasing from a pause
• Movement from a stop in the position zone range
Operation
release level
5 Detection is conducted in position zone setting range.
7
(Note 1)
Detection is conducted in position zone setting range, but
is not conducted in the following conditions.
• The first movement after releasing from a pause
• Movement from a stop in the position zone range
Message
level
Note 1 In this setting, it can avoid a mistake to detect the current during acceleration.
2) Setting of Detection Current
Setting is made by inputting 0 (0%) to 100 (100%) in “Threshold” cell in the position table.
Detection is not conducted if set to 0.
3) Setting of Adjustment time
Setting can be established in the parameters. Setting of parameter ” No.50 Load Output
Judgment Time”
Position zone : 0 to 9999 [ms] (Initial Value 255ms)
4) Setting of Adjustment Range (position zone)
Set the range in “Zone +” and “Zone –“ in the position table. Set a small value in “Zone +” and
“Zone –“.
Position zone : 0.00 to Actuator Stroke Length [mm]
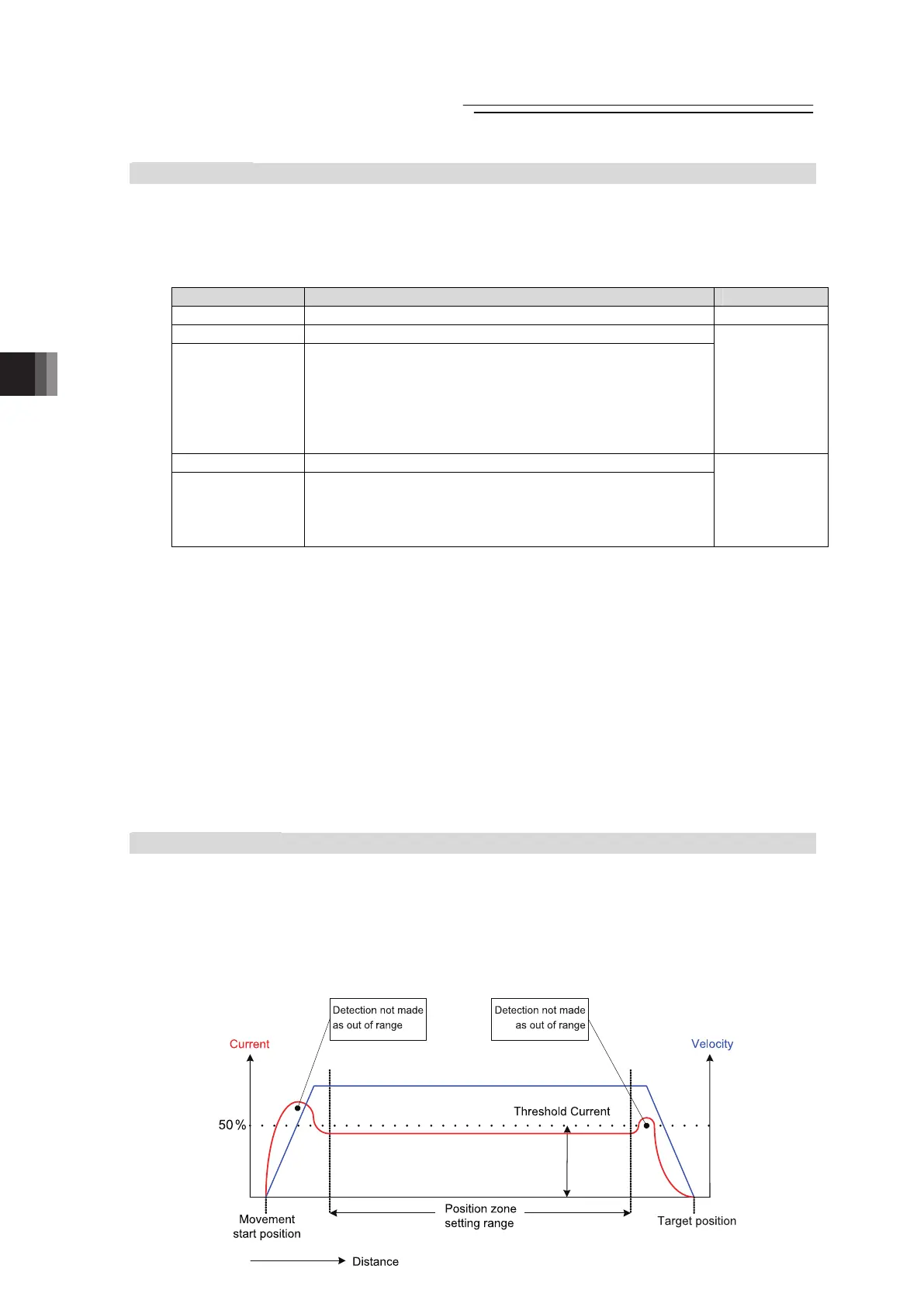
5.3 Adjustment
Refer to the following when performing an adjustment.
1) Adjustment range :
Avoid the acceleration range, which requires high current”, and set the
range with possibility that collision can occur.
2) Detection Current :
Considering the movement velocity and weight of a work piece, set a low
value in the range that detection mistake would not occur. (Set it slightly
higher than the current necessary for constant velocity movement, and
tune little by little.)

 Loading...
Loading...







