Chapter 3 Operation
POWER CON
PCON-CB/LC
71
Chapter 3 Operation
3.1 Basic Operation
3.1.1 Basic Operation Methods
There are two types, Positioner Mode and Pulse Train Control Mode, for the operation. Select
the suitable one considering the system function.
There are various types of actuators including slider, rod, rotary and gripper types. The same
operation control method is applicable unless particular descriptions are contained in this
manual.
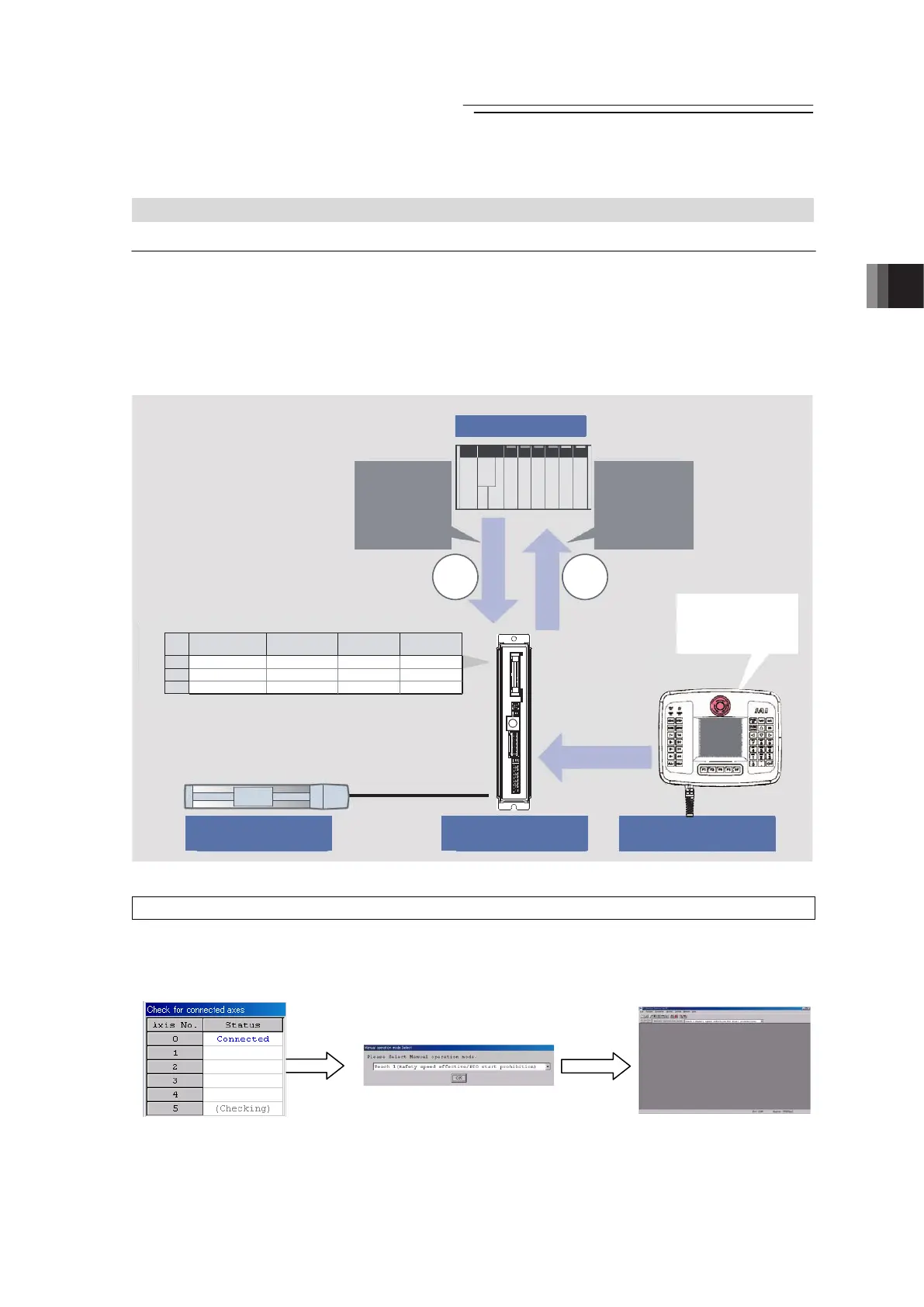
(1) Positioner Mode
Completion
Signal
SignalSignal
Edit Position
Table of
controller
Actuator
Position Number
+
Start Signal
Host Controller
Enter a data including
position, velocity,
acceleration or
deceleration, etc.
No.
[G]
0
1 100.00 0.30 0.30
2 200.00 0.30 0.30
100.00
200.00
Acceleration DecelerationVelocity
[mm] [mm/s] [G]
Position
Controller
Teaching Tool
No.
[G]
0
1 100.00 0.30 0.30
2 200.00 0.30 0.30
100.00
200.00
Acceleration DecelerationVelocity
[mm] [mm/s] [G]
Position
●Operation Ready・・・・Resistration of Position Data (Example of Registration of PC Software)
• Procedure 1 : Turn ON the controller.
• Procedure 2 : Startup a teaching tool such as “PC Software”, and connect to the controller.
Automatically connected
to connectable controller
Press the OK
(Connection mode check)
Startup PC Software

 Loading...
Loading...







