POWER CON
PCON-CB/LC
Complete
Signal
Signal
Edit
Parameters of
controller
Actuator
Controller
Command
Pulse
PLC
Enter an electronic
gear ratio.
Teaching Tool
Completion
Signal
SignalSignal
Edit Position
Table of
controller
Actuator
Position Number
+
Start Signal
PLC
Enter a data including
position, velocity,
acceleration or
deceleration, etc.
No.
[G]
0
1 100.00 0.30 0.30
2 200.00 0.30 0.30
100.00
200.00
Acceleration DecelerationVelocity
[mm] [mm/s] [G]
Position
Controller
Teaching Tool
No.
[G]
0
1 100.00 0.30 0.30
2 200.00 0.30 0.30
100.00
200.00
Acceleration DecelerationVelocity
[mm] [mm/s] [G]
Position
☆Starting Procedures☆
Step 1
Confirm all the necessary things are prepared (Contact us or our sales agency in case of any missing)
Refer to the section “1.1 Product Check” in this manual for more detail.
☆
Controller (PCON-CB)
☆
Actuator and Connection Cable
(The cable differs depending on the actuator type. [Refer to Step3])
*
Check also enclosed parts
[Refer to Section 1.1.1]
☆
CD-ROM (Enclosed in RCM-101-□□)
☆
DVD Instruction Manual
(The following software is included) (includes the following instruction manuals)
・RC PC software [Refer to Instruction Manuals related to this product, which are
provided on the 1.1.3 DVD.]
1) PCON-CB Instruction Manual (this manual)
2) RC PC Software Instruction Manual (ME0155)
☆
For Fieldbus Type: 3) Touch Panel Teaching Instruction Manual (ME0324)
Field Network Setting File 4) Each Fieldbus Instruction Manual (ME0254, etc.)
File (e.g. EDS File) 5) Instruction Manual of the Actuator
Download it in IAI homepage
(http://www.iai-robot.co.jp/
)
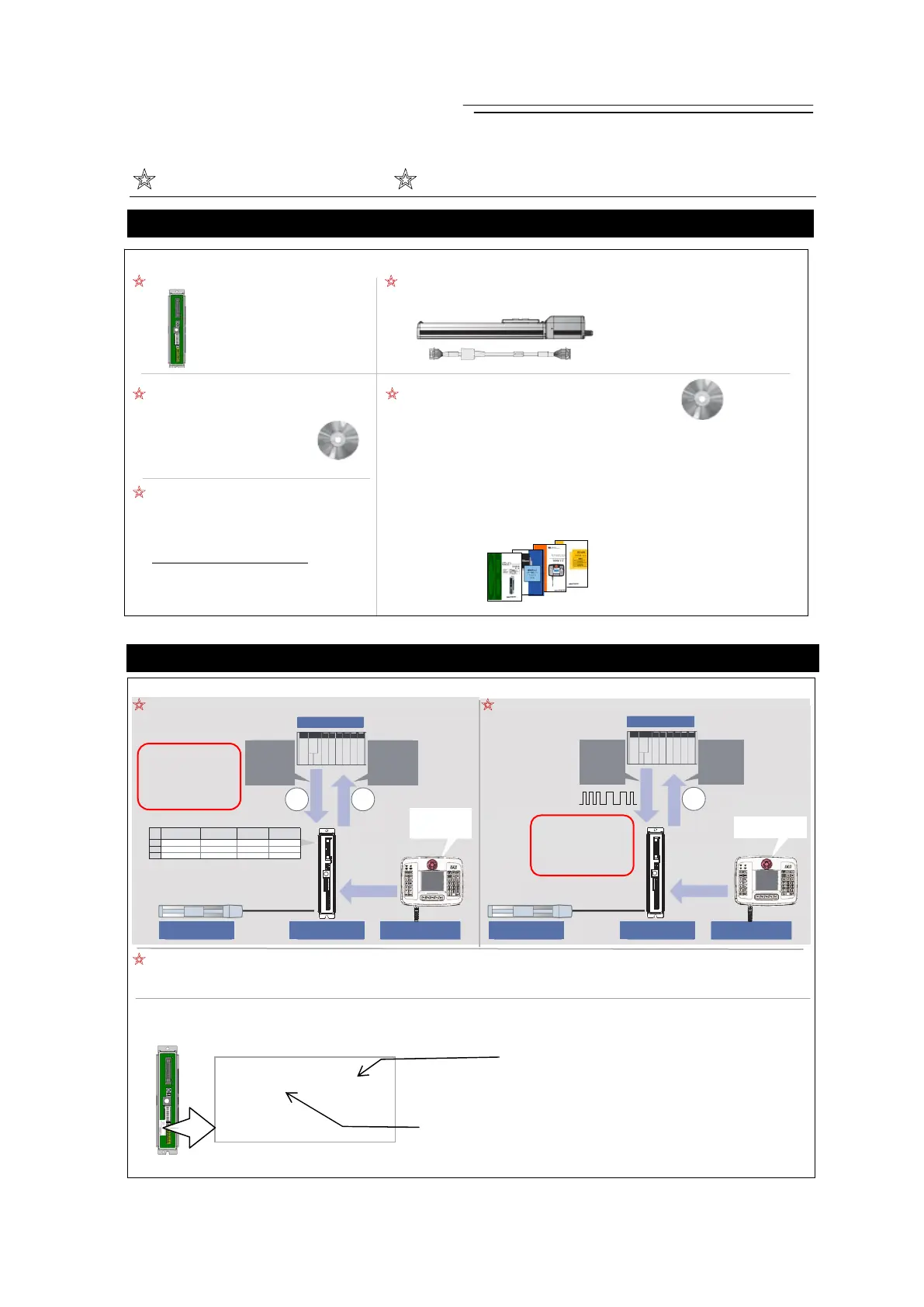
Step 2 Check How to Operate
The operation modes and control methods will defer depending on the type you have purchased.
☆
What is Positioner Operation
☆
What is Pulse Train Control
☆
What is Fieldbus Control
Fieldbus communication is used instead of connected with and controlled by PIO.
Without using position data, operation can also be made by inputting numbers directly.
Check the operation modes and control methods available on the controller you have purchased.
It can be defined on the controller model code shown on the label in the front face of the controller.
Note example
Operate the
registered
position data
with PIO signal
Make operation
with command
pulse
SN: A40969951
PCON-CB-20PWAI-NP-0-0
L=30
ST=8
RCP2-GRSS
Type Name
1) CB / CGB (select from positioner and pulse train)
2) CFB / CGFB (select from positioner and pulse train)
I/O Type
1) NP / PN (dedicated for positioner operation)
2) PLN / PLP (select from positioner and pulse train)
3)
For others, (dedicated for fieldbus control)

 Loading...
Loading...







