Chapter 3 Operation
POWER CON
PCON-CB/LC
145
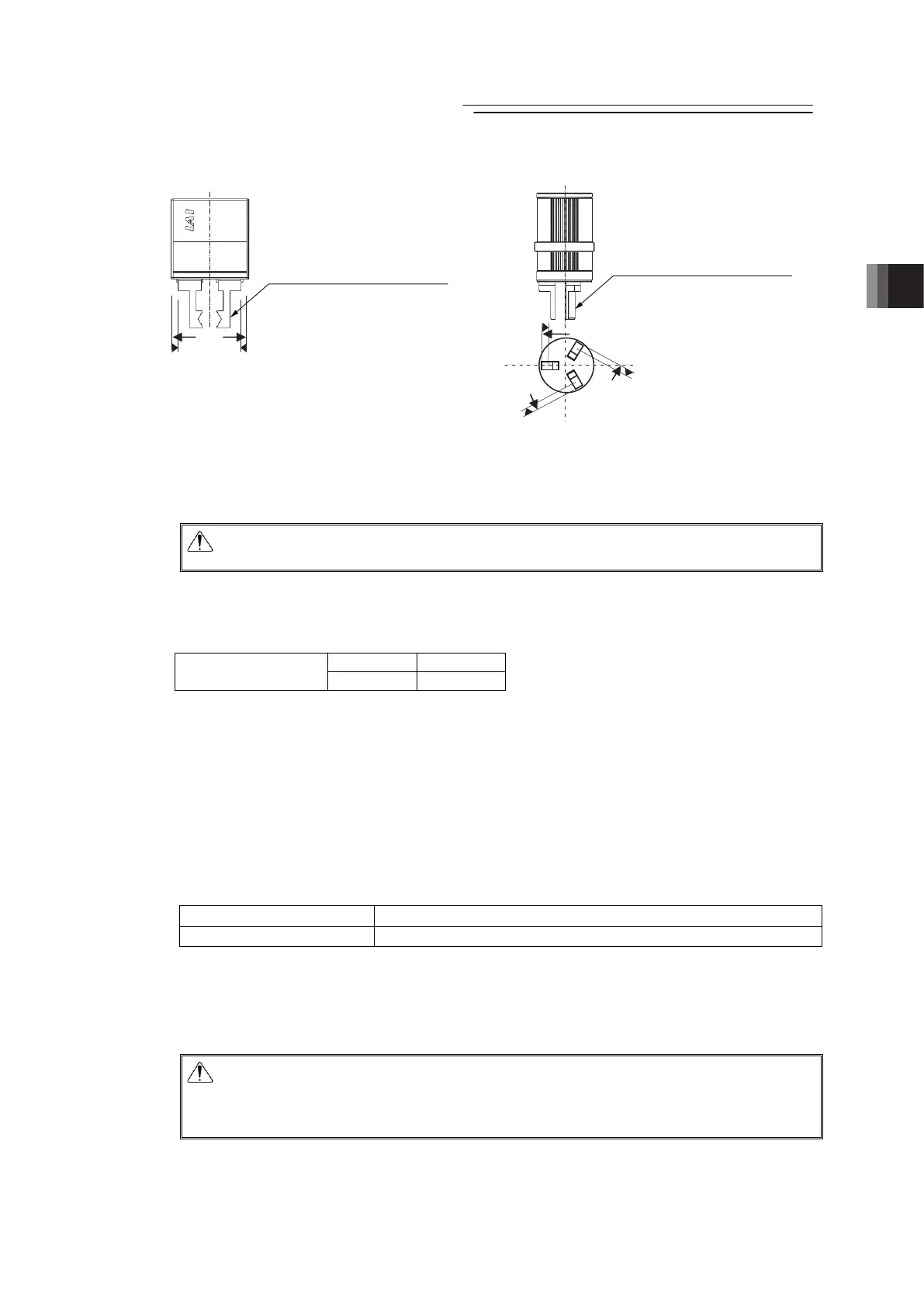
[Operation of Actuator of Gripper Type]
+
+
+
1)
2) 2)
Finger Attachment
Finger Attachment
1)
2)
1)
2)
1)
2)
(Note 1)
(Note 1)
1) If the HOME signal is turned ON, the actuator moves toward the mechanical end (to end
side) at the home return speed (20mm/s).
2) The actuator is turned at the mechanical end and stopped at the home position. The
moving distance is the value set by Parameter No.22 “Home return offset level”.
Caution: Make sure to refer to Section 8.2 [16] when a change to Parameter No.22
“Home return offset level” is required.
Note 1 Finger attachment is not included in the actuator package. Please prepare
separately.
[7] Datum Position Move (RSTR, REND)
Input Output
PIO signal
RSTR REND
RSTR Signal is a command signal to move (Note 1) to the datum position * set at any point.
This command is processed at the startup (ON-edge) and operation to the datum position is
conducted.
Once the movement to the datum position is complete, output REND (datum position
movement complete) signal turns ON
(Note2)
.
For the absolute type actuators with no home-return operation conducted, have the position
management of the host controller conducted at this point.
* Set it in Parameter No. 167 only for the absolute type actuators.
Note 1 Movement to the datum position is made under the following conditions.
Position Pulse train datum position (Parameter No.167 setting position)
Velocity
PIO jog velocity (Parameter No.26 setting position)
Note 2 REND Signal turns off under the following conditions.
1) RSTR signal is ON
2) When servo is OFF
3) ON-edge is detected due to one of the signals of compulsory stop (CSTP), home return
(HOME) or deviation counter clearing (DCLR).
4) Mode changed from AUTO to MANU
Caution:
1) Servo alarm will be generated when RSTR signal is turned ON while HEND is OFF.
2) An alarm for DCLR Signal detection in the datum position movement command will
be generated if turning RSTR Signal gets turned on while DCLR Signal is on.

 Loading...
Loading...







