Chapter 9 Troubleshooting
POWER CON
PCON-CB/LC
216
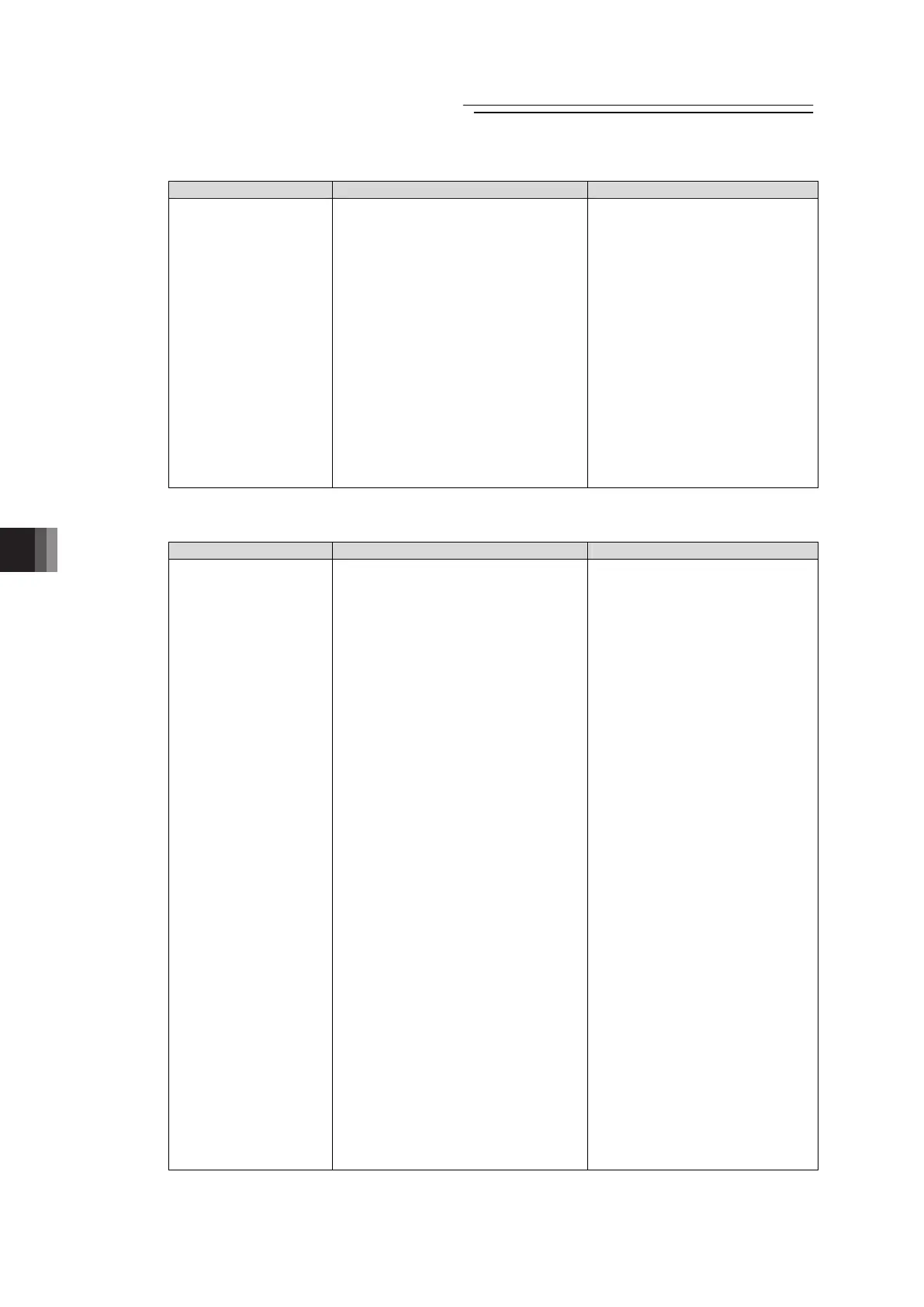
[In the case of Positioner Mode]
Situation Possible cause Check/Treatment
Both position No. and
start signal are input to
the controller, but the
actuator does not move.
There is a problem either in PIO signal
treatment, position table setting or
operation mode selection.
1) Servo OFF condition
2) The pause signal is OFF.
3) Positioning command is issued to a
stop position.
4) There is no positioning data set to
the commanded position number.
5)
Target position number and the start
signal commanded at the same time
1) Is the status display LED SV
turned ON? [Refer to Name for
Each Parts and Their Functions]
Turn ON the servo-on signal
SON of PIO.
2) Operation is available when PIO
pause signal *STP is ON and
pause when it is OFF. Turn it
ON. [Refer to 2.1.2.]
3) Check the sequence or the
settings of the position table.
4) It will generate Alarm Code 0A2
“Position Data Error”. Conduct
the position table setting.
5)
Have 6ms or more between the
target position number
command and start signal
command.
(Note) Refer to 2.1.3 [3] PIO Circuit for PIO signal.
[In the case of Pulse Train Control Mode]
Situation Possible cause Check/Treatment
In spite of inputting
pulse-train to the
controller, the actuator
does not move.
PIO signal processing or parameter
setting is incorrect.
1) Servo OFF condition
2) The pause signal is OFF.
3) The pulse-train type, a parameter, is
selected incorrectly.
4) The positive/negative logic of
pulse-train, a parameter, is selected
inversely.
5) The unit moving distance per pulse,
which is a setting condition of
electronic gear ratio, a parameter, is
too small.
1) Is the status display LED SV
turned ON? [Refer to Name for
Each Parts and Their Functions]
Turn ON the servo-on signal
SON of PIO.
2) Operation is available when PIO
pause signal *STP is ON and
pause when it is OFF. Turn it
ON. [Refer to 2.1.2.]
3) Check the pulse train type.
[Refer to 3.3.4 [2] Format
Settings of Command Pulse
Train.]
4) Check the positive/negative
logic of pulse-train. (Host units
supplied by some manufacturers
have positive/negative logic
opposite to our logic. Reserve
the logic setting and try the
operation.)
[Refer to 3.3.4 [2] Format
Settings of Command Pulse
Train.]
5) Do not make the unit moving
distance less than the resolution
of the encoder. The actuator
does not move unless pulses by
the resolution of the encoder are
input.
[Refer to Caution in 3.3.4 [1]
Electrical Gear Setting]
(Note) In case of 3) or 4), the
actuator may not sometimes
operate smoothly.
You may not find case 5)
when the actuator is moved
for a long distance at a high
frequency.
(Note) Refer to 2.2.3 [3] PIO Circuit for PIO signal.

 Loading...
Loading...







