RCP6 RoboCylinder
Tables of Payload by Speed/Acceleration
High-output setting enabled
(the unit for payload is kg)
Orientation Horizontal Vertical
Speed
(mm/s)
Acceleration (G)
0.5 0.5
0 3 3
40 3 3
85 3 3
130 3 3
150 3 3
200 3 3
High-output setting disabled
(the unit for payload is kg)
Orientation Horizontal Vertical
Speed
(mm/s)
Acceleration (G)
0.5 0.5
0 3 3
40 3 3
85 3 3
130 3 3
150 3 3
Stroke and Max Speed
High-output
setting
Stroke (mm)
110 160 210 260 310
Enabled 200
Disabled 150
(Unit: mm/s)
0
50
100
150
200
250
300
350
0 20 40 60 80 100
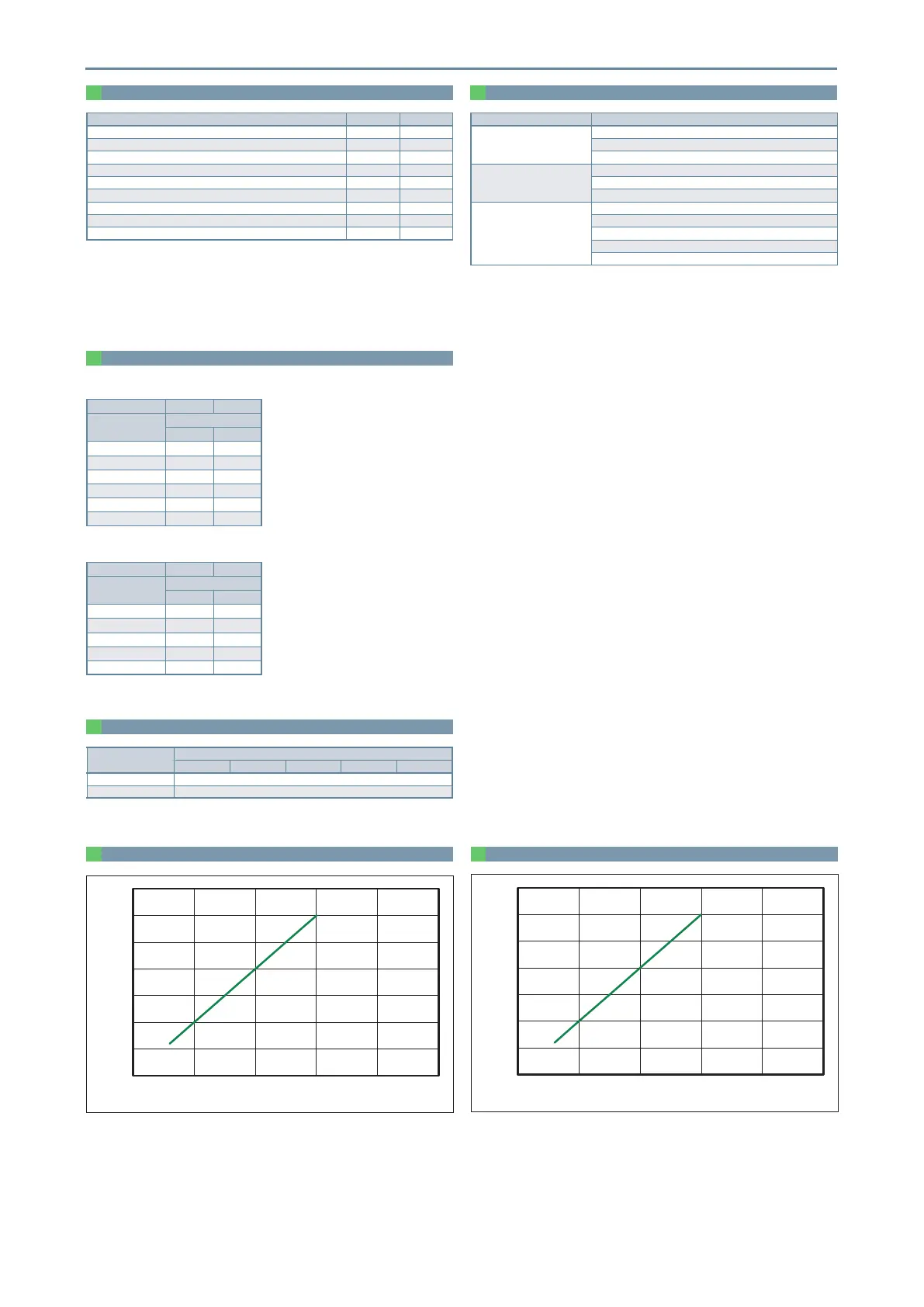
Correlation diagram between push force and push command value
0
50
100
150
200
250
300
350
0 20 40 60 80 100
Pull command value (%)
Correlation diagram between pull force and pull command value
RCP6-RRA4R 6
Options
* Please check the Options reference pages to conrm each option.
Name
Option code
Reference page
Brake (Note 1) B 14
Cable exit direction (bottom) (Note 1, 2) CJB 14
Cable exit direction (outside) (Note 1) CJO 14
Cable exit direction (top) (Note 1) CJT 14
Flange (front) (Note 1) FL 14
Foot bracket (Note 2, 3) FT 15
Equipped with load cell (standard equipment) (Note 4) LCT 15
Motor side-mounted (left) (Note 5) ML 15
Motor side-mounted (right) (Note 5) MR 15
(Note 1) Cable exit direction (CJB/CJO/CJT) and ange (front) (FL) cannot be selected
when selecting brake (B) with a stroke of 110mm.
(Note 2) Foot bracket (FT) cannot be selected when selecting cable exit direction (bottom)
(CJB).
(Note 3) Please refer to P. 15 for the number of brackets included.
(Note 4) Be sure to enter a selection in the options section of the model number.
(Note 5) Be sure to enter a code in the options section of the model number.
Cable Length
Type Cable code
Standard type
P (1m)
S (3m)
M (5m)
Specied length
X06 (6m) ~ X10 (10m)
X11 (11m) ~ X15 (15m)
X16 (16m) ~ X20 (20m)
Robot cable
R01 (1m) ~ R03 (3m)
R04 (4m) ~ R05 (5m)
R06 (6m) ~ R10 (10m)
R11 (11m) ~ R15 (15m)
R16 (16m) ~ R20 (20m)
 Loading...
Loading...






