IPE300 series engineering VFD Function parameter list
-183-
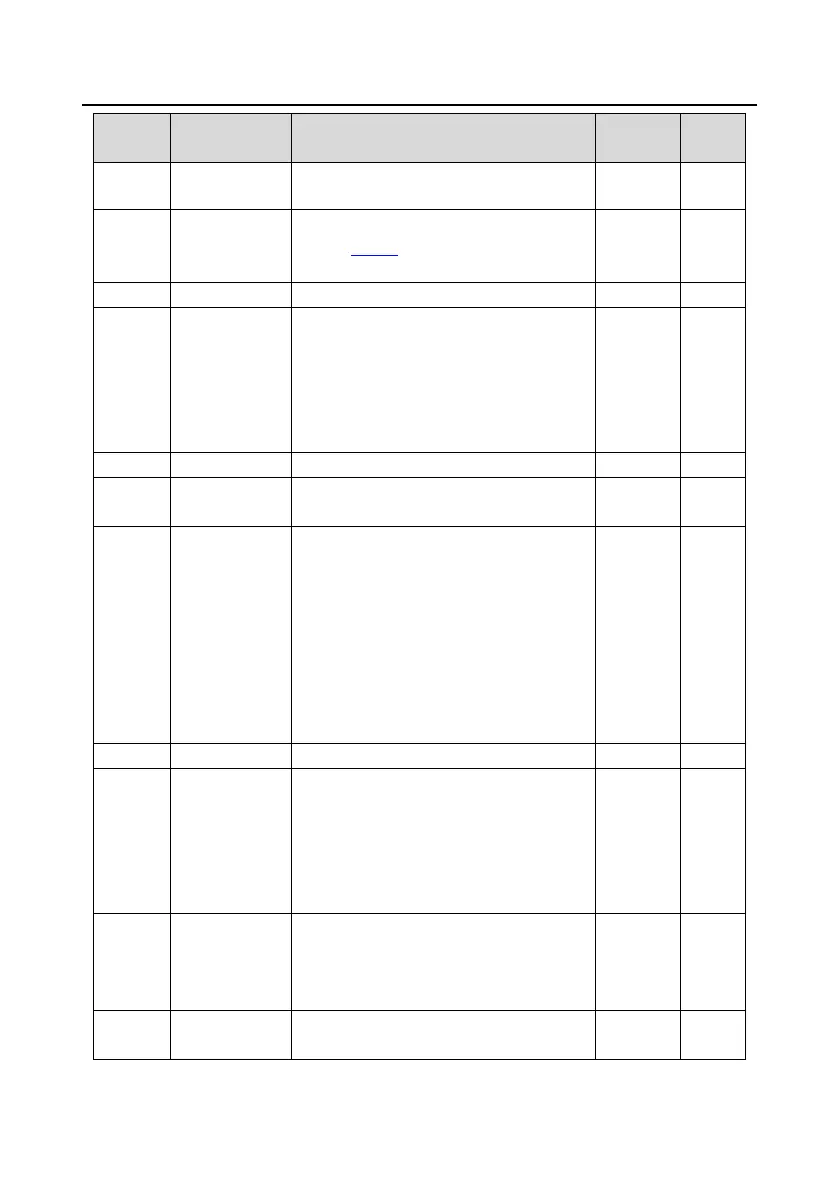
Setting range: 0.0%–100.0% (of the motor
rated current)
Source-current
switchover
frequency
0.00Hz–P00.03 (Max. output frequency)
High-frequency
superposition
voltage
Used to set the pulse current threshold when
the initial magnetic pole position is detected
in the pulse mode, The value is a percentage
in relative to the rated current of the motor.
Setting range: 0.0–300.0% (of the motor
rated voltage)
Used to set the frequency threshold for
enabling the counter-electromotive force
phase-locked loop in SVC 0. When the
running frequency is lower than the value of
the function code, the phase-locked loop is
disabled; and when the running frequency is
higher than that, the phase-locked loop is
enabled.
Setting range: 0–655.35
Maladjustment
detection time
Used to adjust the responsiveness of
anti-maladjustment function. If the load
inertia is large, increase the value of this
parameter properly, however, the
responsiveness may slow down accordingly.
Setting range: 0.0–10.0s
High-frequency
compensation
coefficient of SM
Valid when the motor speed exceeds the
rated speed. If oscillation occurred to the
motor, adjust this parameter properly.
Setting range: 0.0–100.0%
High-frequency
current-loop

 Loading...
Loading...




