External Control (I/O / Fieldbus) 95 DESKTOP ROBOT JR3000
8.
I/O-1
I/O-1 controls the robot by point jobs/PLC programs.
8.1
Connector
There are two types of I/O polarity: NPN Specifications and PNP specifications. After confirming
your robot’s polarity specifications, always connect tools, etc., which are compatible with these
specifications.
■
I/O Polarity
When connecting an external device, make sure it is compatible with the I/O polarity.
The robot’s I/O polarity can be confirmed on the I/O nameplate. Refer to “3.1 I/O Polarity” in
the operation manual
Specifi cations
.
■
I/O Power Supply Indication
•
External
The power supply (DC 24 V) for a device connected to the I/O-1 is supplied externally.
Prepare a separate I/O power supply.
•
Internal
The power supply (DC 24 V) for a device connected to the I/O-1 is output from the I/O-1
connector.
NOTE:
•
I/O power supply type (External/Internal) is selected when you purchase the robot and
cannot be changed after doing so.
•
If you are using the JR3200 equipped with I/O-MT, you cannot use I/O-1.
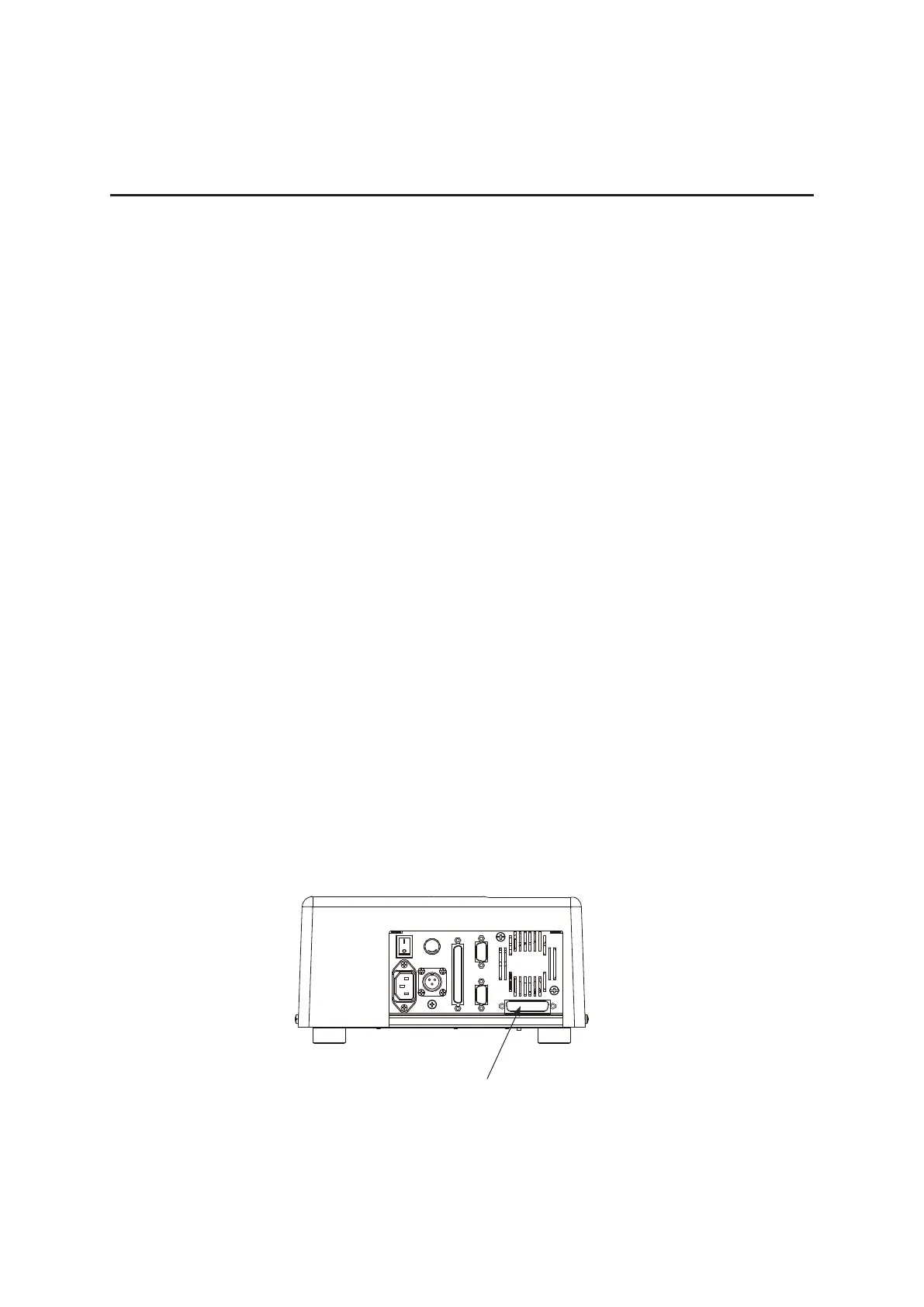
JR3200 Series
Example: JR3203N-AC
I/O-1 (optional)
 Loading...
Loading...


