7.13 Electronic Gearing, Master-Slave operation
In the case of the “electronic gearing” functionality (see setup software and description of
GEARMODE parameter), the servo amplifier is controlled by a secondary feedback
device as a slave.
It is possible to set up master/slave systems, use an external encoder as a setpoint enco-
der or connect the amplifier to a stepper motor control.
The amplifier is parameterized using the setup software (electronic gearing, parameter
GEARMODE).
The resolution (number of pulses per revolution) can be adjusted.
If input X1 is used without the X1 power supply (pins 2, 4, 10, 12), e.g. master-slave ope-
ration with other servoamplifiers, the monitoring of this power supply must be switched off
in order to prevent error message F04 from appearing. To do this, you must change Bit
20 of the DRVCNFG2 parameter (see ASCII object reference in the online help).
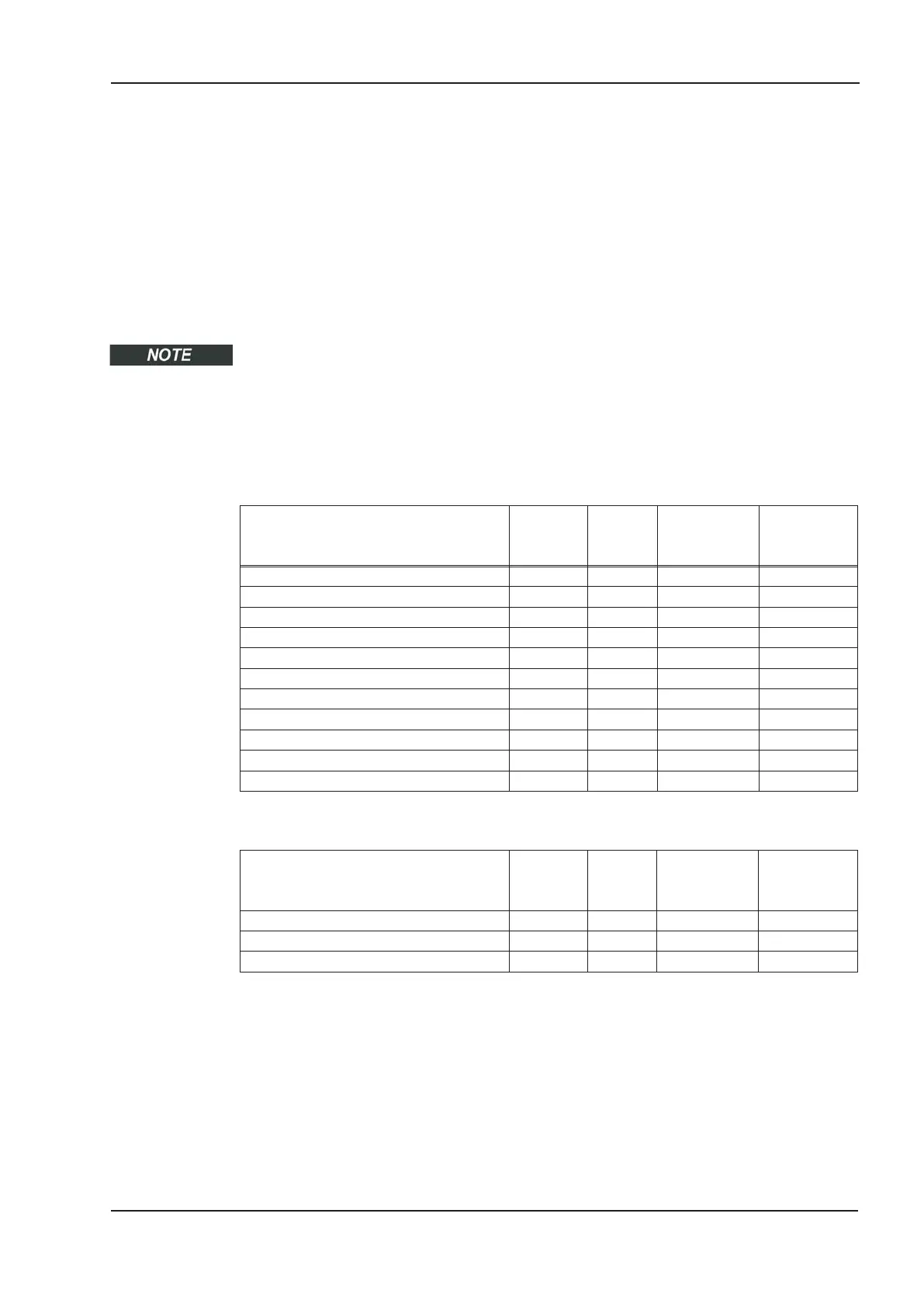
7.13.1 Encoder control types
The following types of external encoder can be used for control:
S700 controlled by
Fre-
quency
limit
Connec-
tor
Wiring
diagram
GEARMODE
Encoder BiSS digital 1,5MHz X1
ð p.79
11, 12
SinCos Encoder ENDAT 2.1 350kHz X1
ð p.80
8
Encoder ENDAT 2.2 1,5MHz X1
ð p.81
13
SinCos Encoder HIPERFACE 350kHz X1
ð p.82
9
SinCos Encoder without data channel 350kHz X1
ð p.84
6, 7
ROD* (AquadB) 5V 1.5MHz X1
ð p.86
30
ROD* (AquadB) 5V 350kHz X1
ð p.87
10
ROD* (AquadB) 24V 100kHz X3
ð p.89
2
SSI 5V 1,5 MHz X1
ð p.91
25
Step/direction 5V 1.5MHz X1
ð p.94
27
Step/direction 24V 100kHz X3
ð p.94
1
With a "PosI/O" or "PosI/O-Monitor" expansion card in slot 2 or 3 (see p.142 ff), the follo-
wing encoder types can be used:
S700 controlled by
Fre-
quency
limit
Connec-
tor
Wiring
diagram
GEARMODE
SSI 5V 1.5MHz X5
ð p.145
5
ROD* (AquadB) 5V 1.5MHz X5
ð p.147
3
Step/direction 5V 1.5MHz X5
ð p.147
4
* ROD is an abbreviation for incremental encoder
S701x2-S724x2 Instructions Manual 93
Kollmorgen 07/2014 Electrical installation
 Loading...
Loading...





