Catch Sensors | V1 | Sensor Configuration
• Detection between 20 cm and 2 m, enter 0.1 ms (recommended for Catch Explorer
sensors)
• Detection above 50 cm, enter 0.4 ms.
Note: Ping length is an important setting for the calibration of the
sensor. If you change the ping length on a sensor calibrated for target strength,
you need to calibrate the sensor again.
4.
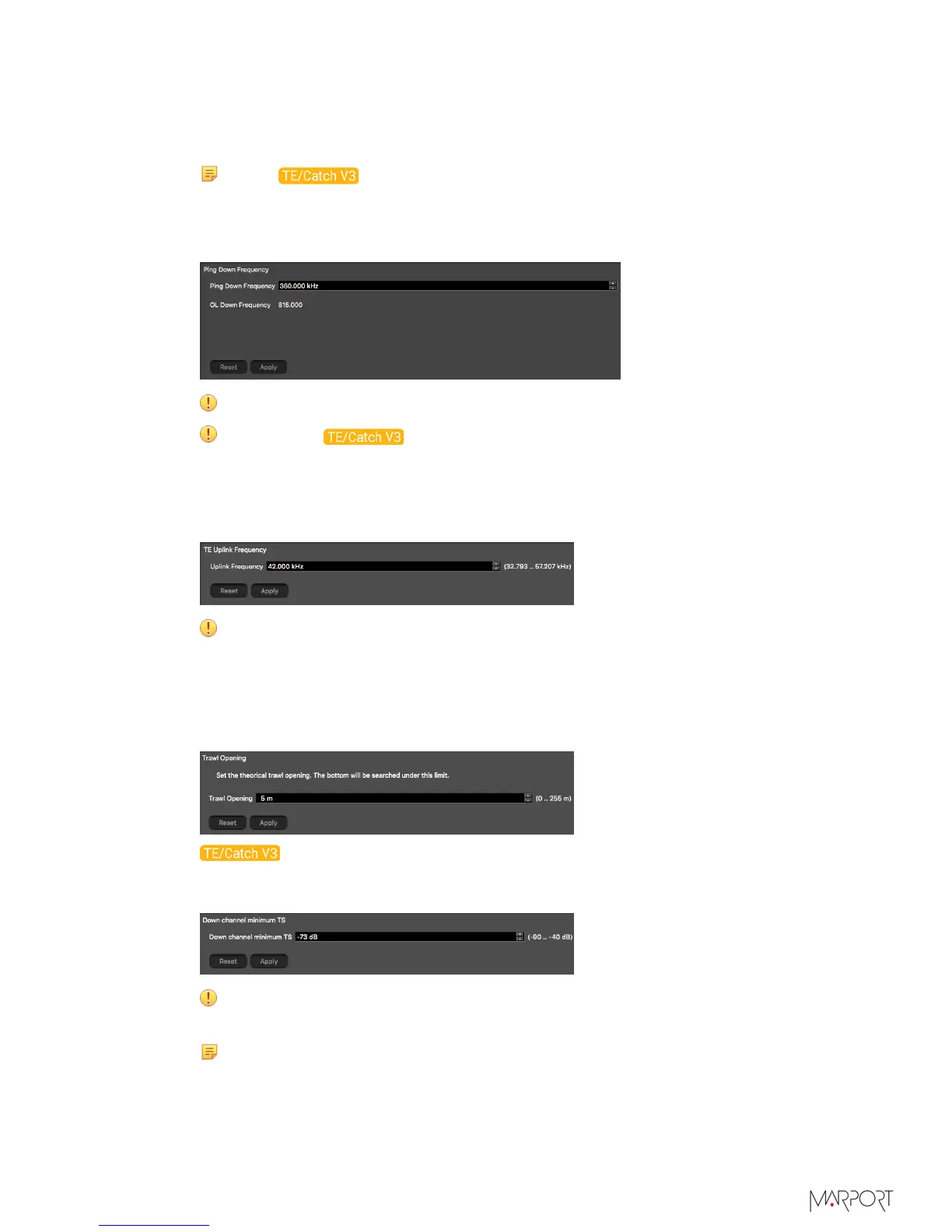
From Ping Down Frequency, enter the frequency for the down sounding.
Important: Frequency needs to be between 360-400 kHz.
Important: Ping frequency is an important setting for the
calibration of the sensor. If you change ping frequency on a sensor calibrated
for target strength, you need to calibrate the sensor again.
5.
From TE Uplink Frequency, enter a frequency for the Uplink (signal toward the
vessel).
Important: This parameter must be the same in the sensor settings in Scala.
6.
If you use the autorange feature, from Trawl Opening, enter a trawl opening to be
sure the sensor will search for the bottom beginning from a certain distance. This
prevents the sensor from confusing the bottom of the codend with the bottom of the
sea. For example, if the bottom of the codend is at 4 meters, enter a greater distance,
such as 5 meters.
7.
For V3 version of the sensor, Down channel minimum TS helps you
detecting targets on the echogram. You can put -79 dB if you want to detect small
targets. Otherwise, leave the default settings at -73 dB.
Important: This parameter must be the same in the sensor settings in Scala.
8.
From Down TVG Mode, select the appropriate TVG (Time Variable Gain) mode.
Note: Signals sent by the sensor are attenuated in the water. It means the
deeper the target is, the more attenuated signals will be received and sent back.
TVG (time variable gain) is here to compensate this effect by using a lower gain
level when signals travel toward a target at a small distance and higher gain
| 26