3. Instructions
772
CS/CJ/NSJ Series Instructions Reference Manual (W474)
Precautions for Correct Use
If ACC(888) or PLS2(887) is executed within one cycle where pulse output stops (Output In-progress
Flag would be ON), the system waits for pulse output to stop and then pulse output is restarted in the
next cycle. If pulse output is stopped with INI(880), however, pulse output instructions executed within
one cycle of stopped will not be executed. Wait for the Output In-progress Flag to turn OFF before
executing the next instruction.
If pulse output that is being executed for SPED(885) is stopped by setting the target frequency to 0 pps
with SPED(885) or ACC(888), operation will be the same as when pulse output is stopped with
INI(880). Wait for the Output In-progress Flag to turn OFF before executing the next positioning
instruction.
Example Programming
When CIO 0.00 turns ON in the following programming example, ACC(888) starts pulse output from
pulse output 0 in continuous mode in the clockwise direction using the CW/CCW method. Pulse output
is accelerated at a rate of 20 pps every 4 ms until the target frequency of 500 pps is reached. When
CIO 0.01 turns ON, ACC(888) changes to an acceleration rate of 10 pps every 4 ms until the target
frequency of 1,000 pps is reached.
z Operation Compensation When Parameters Are Changed
If a constant speed cannot be achieved or the target position is exceeded after parameters are
changed in independent mode, operation can be compensated and continued.
Note On the CJ1M-CPU2@, operation compensation cannot be used.
• Target Frequency Not Reached
If operation compensation for parameter
changes is enabled by setting bit 14 of M to
1, triangular control will be performed to
approach the target frequency as much as
possible.
If operation compensation for parameter
changes is disabled by setting bit 14 of M
to 0, an instruction error will occur and
ACC(888) will not be executed.
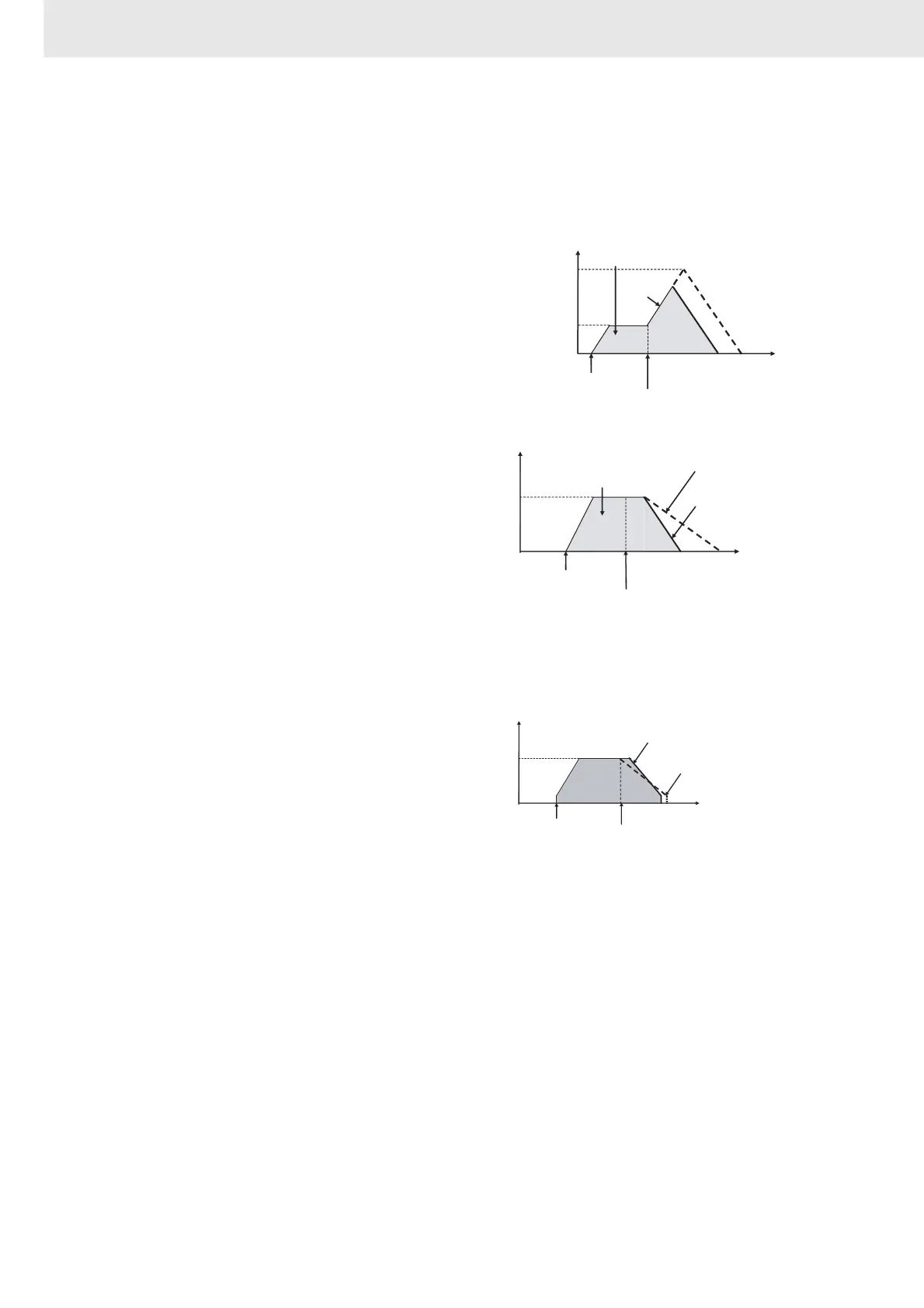
• Exceeding Target Position with Specified
Acceleration/Deceleration Rate
If operation compensation for parameter
changes is enabled by setting bit 14 of M to
1, the deceleration rate will be changed to
enable stopping at the target position.
If operation compensation for parameter
changes is disabled by setting bit 14 of M
to 0, an instruction error will occur and
ACC(888) will not be executed.
Note 1 If the corrected deceleration rate would
exceed 65,535, an immediate stop is per-
formed.
2 If the corrected deceleration rate is not an
integer, it will be rounded up. The error
that would occur from the decimal portion
is compensated for at a constant speed
and then deceleration is started.
Pulse frequency
Specified number of pulses
(Specified with PULS(886).)
Execution of
ACC(888)
Execution of ACC(888)
Target frequency changed.
Time
Target
frequency
Target frequency after
change specified with
ACC(888)
Acceleration/
deceleration
rate
Pulse frequency
Specified number of pulses
(Specified with PULS(886).)
Execution of
ACC(888)
Execution of ACC(888)
Acceleration/deceleration rate changed.
(Target frequency not changed.)
Time
Target
frequency
Acceleration/deceleration
rate after change
specified with ACC(888)
Corrected acceleration/
deceleration rate
Pulse frequency
Execution of
ACC(888)
Execution of ACC(888)
Acceleration/deceleration rate changed.
(Target frequency not changed.)
Time
Target
frequency
Actual deceleration rate
Ideal deceleration rate