3. Instructions
642
CS/CJ/NSJ Series Instructions Reference Manual (W474)
• For proportional operation only, the manipulated variable output when the PV equals the SV can be
designated as follows:
0: Output 0%
1: Output 50%.
• The direction of proportional operation can be designated as either forward or reverse.
• The upper and lower limits of the manipulated variable output can be designated.
• The sampling period can be designated in units of 10 ms (0.01 to 99.99 s), but the actual PID action
is determined by a combination of the sampling period and the time of PID(190) instruction execution
(with each cycle).
• The timing of enabling changes made to PID constants can be set to either 1) the beginning of PID
instruction execution or 2) the beginning of PID instruction execution and each sampling period. Only
the proportional band (P), integral constant (Tik), and derivative constant (Tdk) can be changed each
sampling cycle (i.e., during PID instruction execution). The timing is set in bit 1 of C+5.
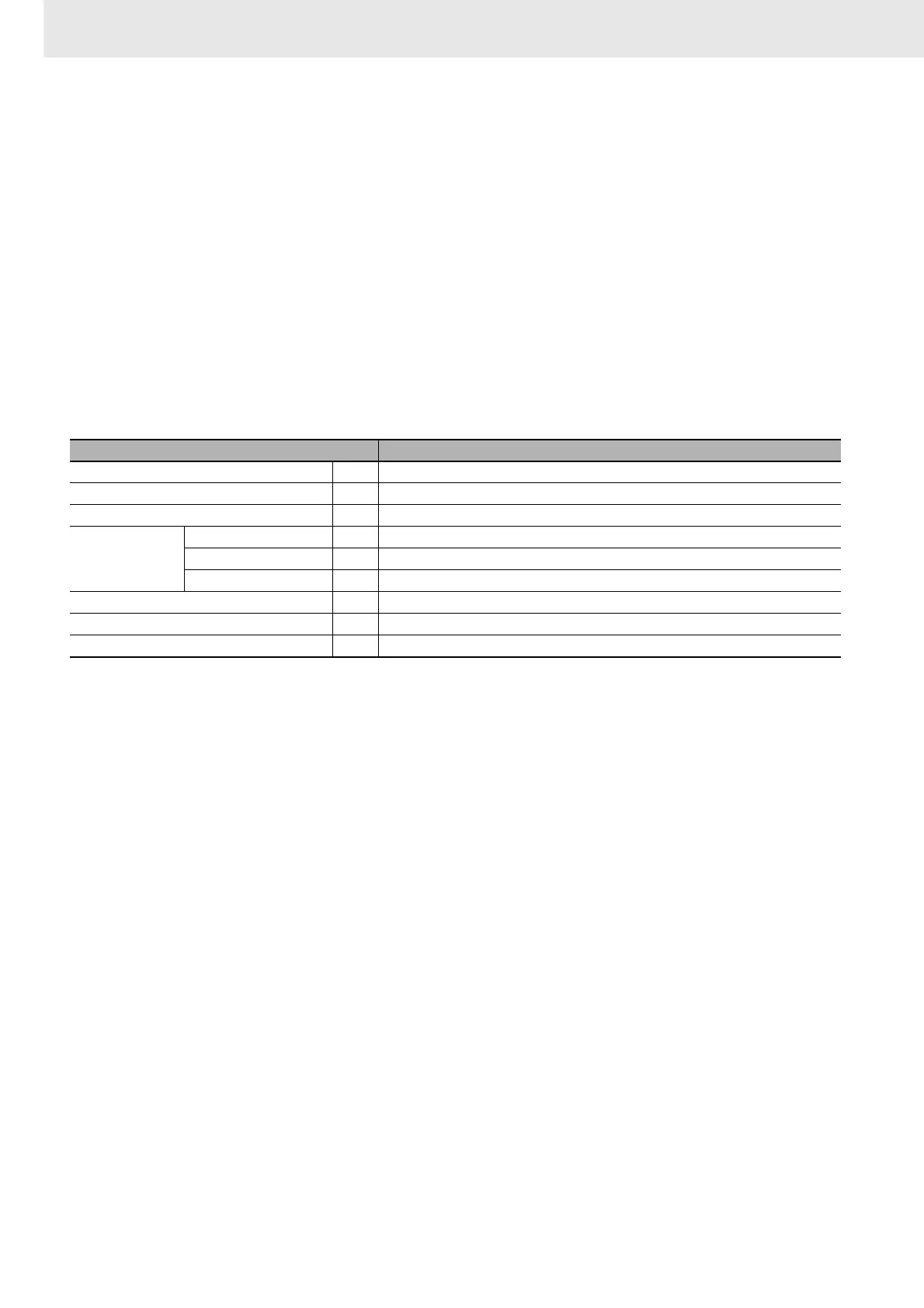
Performance Specifications
Calculation Method
Calculations in PID control are performed by the target value filtered control with two degrees of
freedom.
Item Specifications
PID control method --- Target value filter-type two-degrees-of-freedom PID method (forward/reverse)
Number of PID control loops --- Unlimited (1 loop per instruction)
Sampling period τ 0.01 to 99.99 s
PID constant Proportional band P 0.1 to 999.9%
Integral constant Tik 1 to 8191, 9999 (No integral action for sampling period multiple, 9999.)
Derivative constant Tdk 0 to 8191 (No derivative action for sampling period multiple, 0.)
Set value SV 0 to 65535 (Valid up to maximum value of input range.)
Measured value PV 0 to 65535 (Valid up to maximum value of input range.)
Manipulated variable MV 0 to 65535 (Valid up to maximum value of output range.)