643
3. Instructions
CS/CJ/NSJ Series Instructions Reference Manual (W474)
Data Control Instructions
3
PID
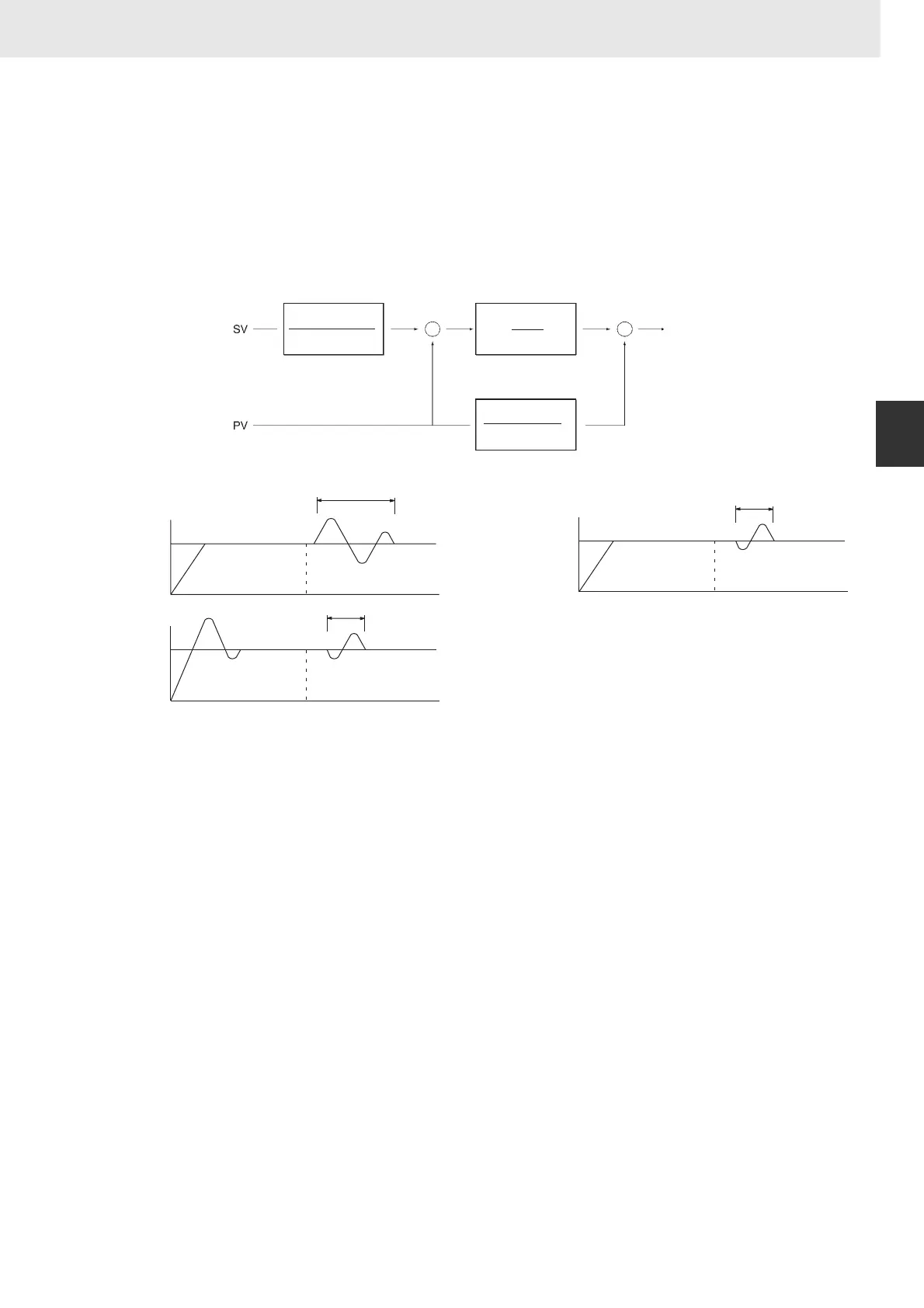
Block Diagram for Target Value PID with Two Degrees of Freedom
When overshooting is prevented with simple PID control, stabilization of disturbances is slowed (1). If
stabilization of disturbances is speeded up, on the other hand, overshooting occurs and response
toward the target value is slowed (2).
When target-value PID control with two degrees of freedom is used, on the other hand, there is no
overshooting, and response toward the target value and stabilization of disturbances can both be
speeded up (3).
1 + (1 – λ) Ti · s
1 + Ti · s
+
–
+
–
Kp +
Kp
Ti · s
Kp Td/s
1 + λ Td · s
.
Measured
value (PV)
Set value
(target value)
Target value filter Proportional + integral elements
Preceding
derivative-type elements
Manipulated variable
Kp: Proportional constant
Ti: Integral time
Td: Derivative time
s: Laplace operator
α: 2-PID parameter
λ: Incomplete derivative coefficient
(1)
(2)
(3)
Disturbance response
Simple PID Control
Feed-forward PID Control
As the target response is slowed,
the disturbance response worsens.
As the disturbance response is
slowed, the target response worsens.
Overshoot
Target response