Chapter 2
2-21
Standard Models and Specifications
■ Control I/O Signals
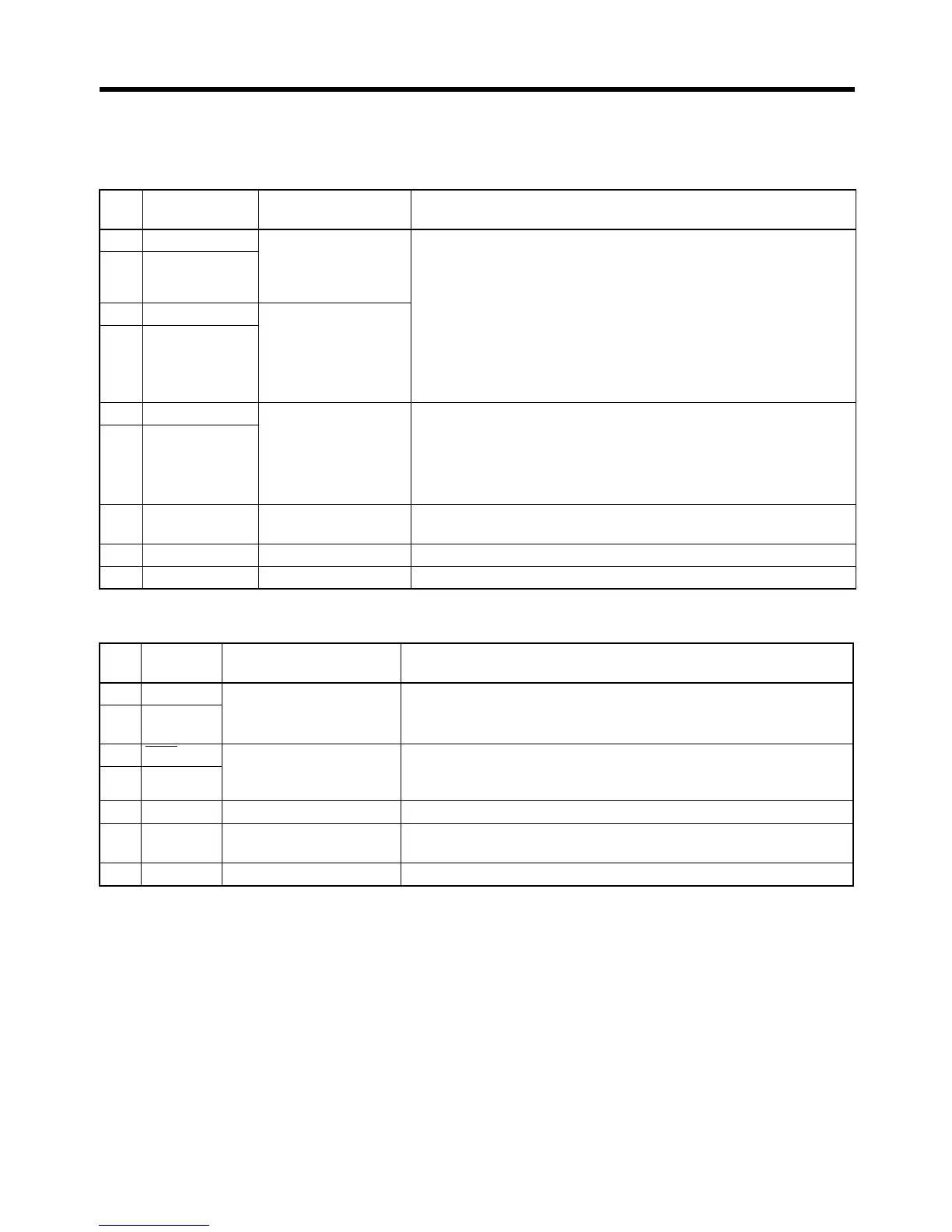
● CN1 Control Inputs
● CN1 Control Outputs
Note An open-collector output interface is used for pin-7 and -8 sequence outputs. (Maximum operating volt-
age: 30 V DC; maximum output current: 50 mA)
Pin
No.
Signal name Function Contents
1 +PULS/CW/A Feed pulses, reverse
pulses, or 90
° phase
difference pulses
(phase A)
Pulse string input terminals for position commands.
Line-driver input: 7 mA at 3 V
Maximum response frequency: 250 kpps
Open-collector input: 7 to 15 mA
Maximum response frequency: 250 kpps
Any of the following can be selected by means of a Pn200.0
setting: feed pulses or direction signals (PULS/SIGN); forward
or reverse pulses (CW/CCW); 90
° phase difference (phase A/B)
signals (A/B).
2–PULS/CW/A
3 +SIGN/CCW/B Direction signal, for-
ward pulses, or 90
°
phase difference
pulses (phase B)
4 –SIGN/CCW/B
5 +ECRST Deviation counter
reset
Line-driver input: 7 mA at 3 V
Open-collector input: 7 to 15 mA
ON: Pulse commands prohibited and deviation counter cleared.
Note Input for at least 20
µs.
6 –ECRST
13 +24VIN +24-V power supply
input for control DC
Power supply input terminal (+24 V DC) for sequence inputs
(pins 14 and 18).
14 RUN RUN command input ON: Servo ON (Starts power to Servomotor.)
18 RESET Alarm reset input ON: Servo alarm status is reset.
Pin
No.
Signal
name
Function Contents
32 Z Phase Z output Outputs the Encoder’s phase Z. (1 pulse/revolution)
Open collector output (maximum output voltage: 30 V DC max;
maximum output current: 20 mA)
33 ZCOM
34 ALM
Alarm output When the Servo Driver generates an alarm, the output turns
OFF. Open collector output (maximum operating voltage: 30 V
DC; maximum output current: 50 mA)
35 ALMCOM
7 BKIR Brake interlock output Outputs the holding brake timing signals.
8 INP Positioning completed
output
ON when the position error is within the positioning completed
range (Pn500).
10 OGND
Output ground common Ground common for sequence outputs (pins 7 and 8).

 Loading...
Loading...








